N.I.N.A.のオートフォーカスを設定する
リモート撮影に欠かせない電動フォーカサーですが、精度よくオートフォーカスを行うためにはバックラッシュの設定が必要です。今回はN.I.N.A.を使う前提で、バックラッシュの測定とバックラッシュ補正値の設定方法について説明します。全体的なN.I.N.A.の使い方については下記の記事を参照ください。また、オートフォーカスについての詳細な説明は、公式サイトの説明を参照ください。
目次
オートフォーカスの動作原理
N.I.N.A.のオートフォーカスは、フォーカサーの位置を変えながら撮影を繰り返し、撮影された星像の大きさを調べることで行われます。具体的には、以下の手順で行われています。(※1)
- 現在のフォーカサー位置で撮影を行い、HFRを計算する。これが基準画像となり、基準画像のHFRとAF後のHFRを比較することでフォーカスが良化したかどうかを判断する。
- 決められたステップ数(以下ステップサイズ)×オフセットステップ数分フォーカサーをプラス方向に移動する。
- 決められた撮影枚数だけ露光を繰り返し、得られた画像から星像のHFRを計算する。
- フォーカサーをステップサイズ分だけマイナス方向に移動し、2.を行う。
- 3.-4.をある回数繰り返す。回数の決定は以下の基準で行われる。
1) HFRの最小値が見つかるまで
2) 少なくともオフセットステップ数まで
3) フォーカスカーブの右側(プラス側)に測定点が足りないと判断した場合、追加でプラス側のHFR測定を行う - 横軸にフォーカサー位置、縦軸にHFRをプロットすることで、下に凸の曲線(以下フォーカスカーブとする)が得られる。
- フォーカスカーブを適切な関数で近似する。近似関数には直線、放物線、双曲線が選択可能であるが、一般的には双曲線を使用する。
- 合焦位置を7.で得られた曲線の極小値として求める。
- バックラッシュを考慮してフォーカサーを合焦位置に(通常はプラス方向へ)移動する。
- 9.で移動した位置にて再度HFR測定を行う。ここで得られたHFRの値が基準画像のHFRより15%以上大きくなっている場合はオートフォーカスが失敗したと判断し、エラーとなる。エラー発生時フォーカサーは初期位置へ戻るか、再度AF操作が行われる。
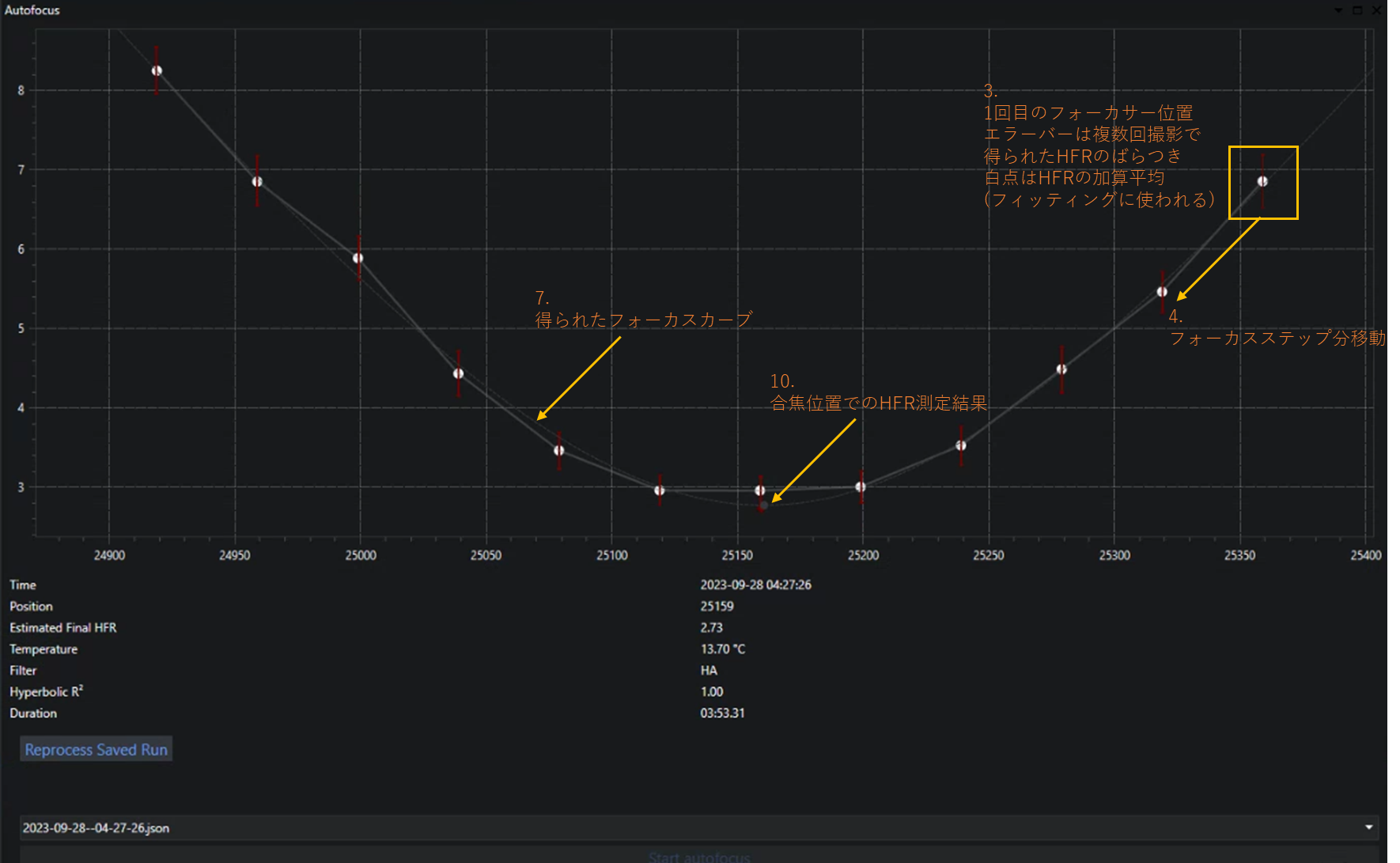
正しくオートフォーカスの設定が構成されている場合、図1のようなフォーカスカーブが得られます。
※1 N.I.N.A.では一般的なデジタル一眼レフやスマートフォン用カメラが持っている「コントラストAF」を実行することができるが、検出精度に課題があるとして非推奨とされているため説明は割愛する。
最終的なオートフォーカスの精度を決定するうえでは、9.で登場したバックラッシュが課題となることが多いです。精確なオートフォーカスを行うためには、バックラッシュの値を精度よく決定することが重要です。(そのためには、バックラッシュの繰り返し再現性が重要となります。フォーカサーを精度よく駆動できる機材が用意できていることが前提となります。)
主要なパラメータとその設定
バックラッシュの測定に移る前に、主要なパラメータを設定する必要があります。主要なパラメータには以下のようなものがあります。取り上げた以外のパラメータについては基本的にデフォルトでうまくいく場合が多いです。
オートフォーカスパラメータの設定
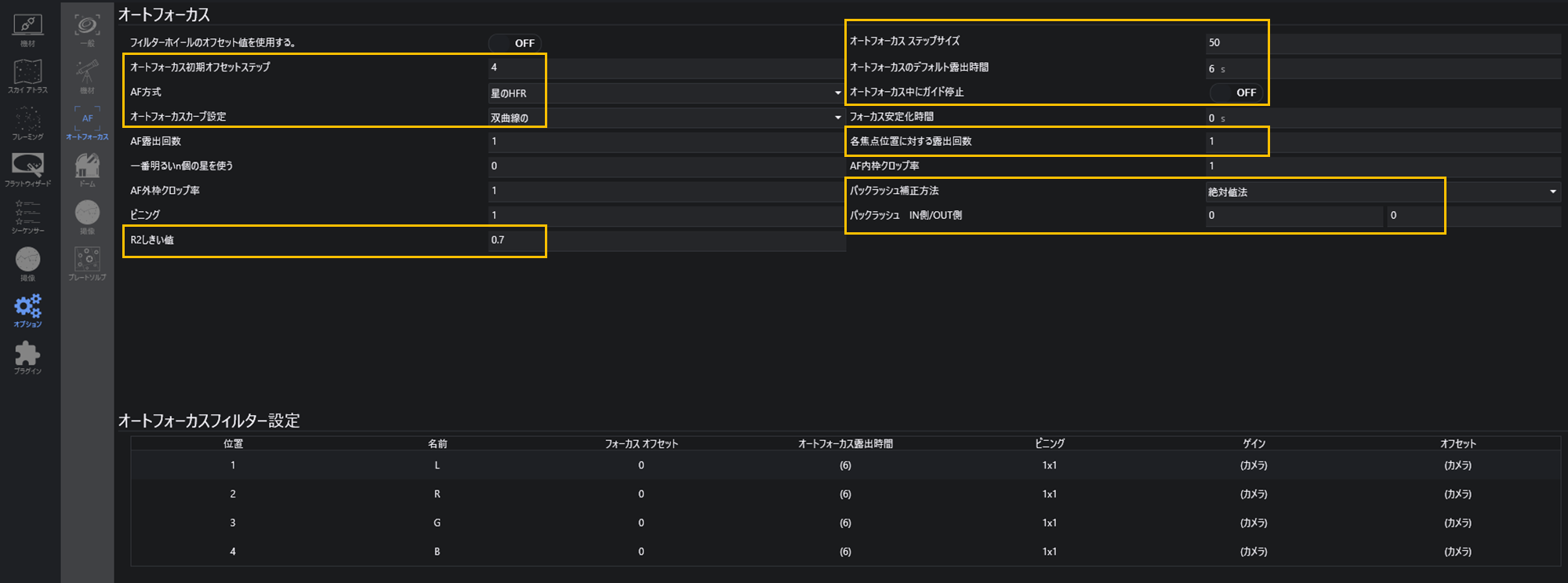
- オートフォーカス初期オフセットステップ: 前項 2.で取り上げたオフセットステップです。通常4-6程度あれば十分です。
- AF方式: 通常は星のHFRを選択します。コントラストAFも可能です。
- オートフォーカスカーブ設定: 通常は双曲線を選ぶとよい結果が得られます。
- R2しきい値: 前項7. でフィッティングしたときの決定係数を表します。決定係数がこの値を下回る場合失敗とみなされます。0にすると判定を行いません。良好なAFが行われた場合は、決定係数が0.9を超えることが多いです。
- オートフォーカスステップサイズ: AFの1ステップにおいてフォーカサーを何ステップ動かすかを決めます。この値は光学系の焦点距離とフォーカサーの1ステップにおける回転角度(フォーカサーの移動距離)で大きく変化します。はじめは適当な値を入れてテストし、HFRの変化が大きすぎる場合はステップサイズを小さく、HFRの変化が小さすぎる場合はステップサイズを大きくします。焦点距離とフォーカサーの回転角度から計算することも可能です。(筆者は未検証)
- オートフォーカスのデフォルト露出時間: HFR測定に使用する画像の露出時間を決定します。長くすればS/N比が上がり、HFR測定の精度が向上しますが、AFの所要時間も増加します。筆者はブロードバンドのフィルタで1 s, ナローバンドのフィルタで3 sを目安にしています。「オートフォーカスフィルター設定」よりフィルターごとに設定が可能です。ナローバンドのフィルタではゲインも上げることをおすすめします。
- オートフォーカス中にガイド停止: PHD2のオートガイドを実行中にフォーカサーを駆動すると(特にオフアキシスガイドを行っている場合)、ガイドグラフが乱れ、正常にHFR測定が行われないことがあります。通常はオンにしておくことをおすすめします。
- 各焦点位置に対する露出回数: フォーカサー位置が同じであっても、HFR測定を繰り返した場合、求められたHFRの値は様々な要因でばらつきます(シンチレーションによる星像の肥大、地面振動や風による星像の変形など)。そのため通常は同じフォーカサー位置で繰り返しHFR測定を行い、その加算平均を採用することが望ましいです。筆者は3回にしています。
- バックラッシュ補正方法、バックラッシュ IN/OUT側: 詳細は後述します。
撮像パラメータの設定
AF時のHFR検出にはストレッチした画像を使用するため、撮像パラメータのうちストレッチやノイズ処理に関わるパラメータを変更することで結果が変わります。

- デベイヤ画像、デベイヤ処理HFR, 連結無しストレッチ: カラーカメラの場合はすべてオンにすることが推奨されています。
- 星検出プログラム、星注釈プログラム、オートフォーカス: プラグイン “Hocus Focus”をインストールするとプルダウンが表示されます。Hocus FocusはN.I.N.A.がデフォルトで持っているHFR検出やAFの機能を強化するプラグインであり、使用することをお勧めします。
- 自動ストレッチ因数(引数のtypo?): ストレッチの強さを指定します。光学系やカメラによってプレビューに見えているストレッチ画像の明るさが変わるため、適切と思われる値を設定します。
- 星感度、ノイズ低減: 光学系やカメラによって星検出がうまくいっていない、またはHFRのばらつきが大きいと思われる場合は、感度を上げ、ノイズ低減をオンにすると改善する場合があります。
ここまで設定を終わらせたら、バックラッシュの測定を行います。その前に、バックラッシュについて簡単に説明いたします。
バックラッシュ
バックラッシュとは
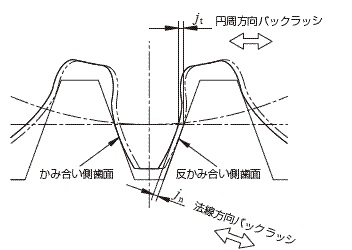
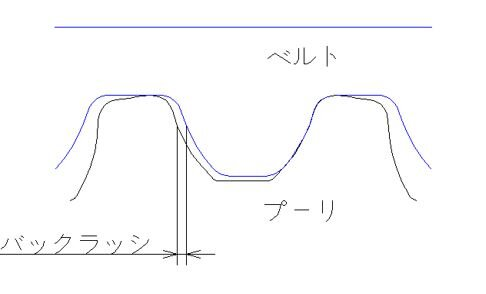
電動フォーカサーのような駆動機構では、歯車やベルトのような動力伝達要素が用いられます。歯車やベルトは歯どうしの干渉を防ぐために部品間へ隙間を開ける必要があります。このような隙間をバックラッシュ(backlash)と呼ぶことが多いです。このバックラッシュは歯がかみ合って動く一対の部品間にそれぞれ必要であり、各部品が持つバックラッシュの合計がオートフォーカスを行う際に表れて精密なオートフォーカスの支障となります。
バックラッシュの補正法
N.I.N.A.は2種類のバックラッシュ補正法を持っています。
① 絶対値: フォーカサーがマイナス方向からプラス方向に移動方向を変えるとき(またはその逆)、バックラッシュの値だけ余分にフォーカサーを動かすことでバックラッシュを補正する。
② オーバーシュート: フォーカサーが移動方向を変えるとき(例: マイナスからプラス方向へ変化する場合)、フォーカサーをプラス方向へ余分に動かしてから、マイナス方向へ動かすことでバックラッシュを補正する。これによりAF完了時のフォーカサー移動方向は常に同じ方向となる。
これまでに試した限りでは①と②どちらが適しているかはフォーカサーの駆動機構により異なることがあるため、初めて試す光学系の場合は①と②の両方を試すことをお勧めします。
バックラッシュの測定
バックラッシュを測定するにはいくつかの方法が考えられます。
- 実際の星像を取得し、HFRの変化から測定する
- ドローチューブにダイヤルゲージを当て、ドローチューブの動く量を測定する
今回は1.の方法について取り扱います。(2.についても検証予定)
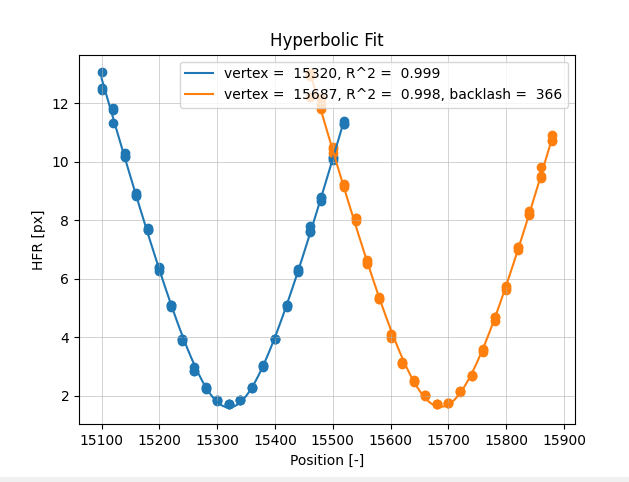
この方法では、フォーカサーをあるステップ数回転させ、撮影する操作を複数回繰り返し、その後逆回転させて同じ操作を繰り返します。これにより、フォーカサーのステップ数に対してHFRがどのように変化するかのプロットが得られます(図6)。上述の通り、プロットは下に凸の双曲線となり、バックラッシュが残っている場合は頂点がずれた二つの双曲線が得られます。これらの双曲線の頂点のずれをバックラッシュとしています。図6ではプロットを双曲線でフィッティングし、得られた双曲線の頂点を計算しています。
バックラッシュ補正値の決定
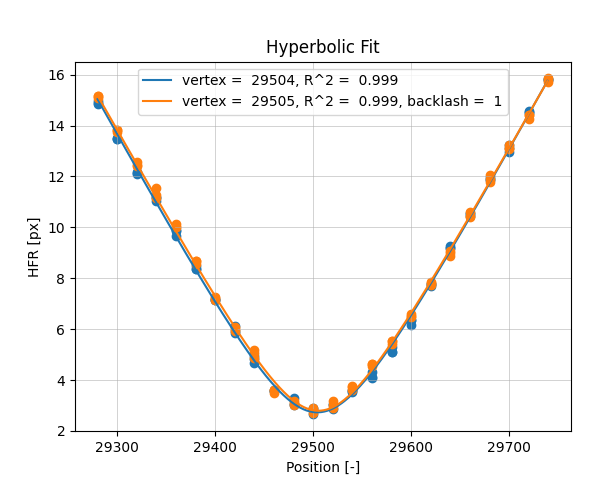
図6のようにバックラッシュの測定結果が得られたら、その値を図2の「バックラッシュ IN/OUT側」へ入力します。絶対値法で補正する場合は両側に同じ値を、オーバーシュート法で補正する場合は片側に補正値を入力し、もう片方は0にしておきます。設定が終わったら、同様の測定を繰り返して、図7のように行きと帰りのカーブが一致する補正値を探します。
“N.I.N.A.のオートフォーカスを設定する” への1件の返信