【連載】PixInsightを使った天体写真の画像処理④ 前処理(3)
前回の記事更新からかなり間が空いてしまいましたが、引き続き前処理の手順を記載していきます。
目次
位置合わせ
赤道儀を使ってガイド撮影をしていても、ディザリングやたわみ・ガイドエラーなど様々な要因を受けて、各サブフレーム間で若干星像の位置ずれが発生します。そのため、各サブフレームの位置合わせを行い、スタックに入力できるようにします。
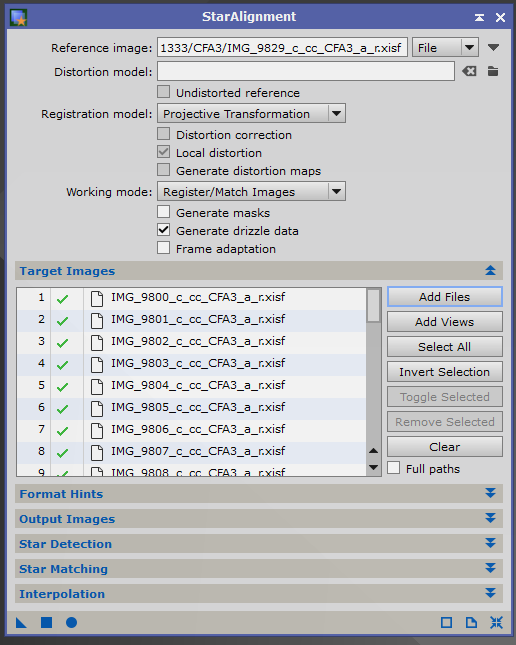
“PROCESS” → “StarAlignment”を起動し、次の設定を行います。
- Reference image: SubFrameSelector より選択した、Weightが最大のサブフレームを入力します。
- “Generate drizzle data”にチェックを入れます。
- Target Images: 全てのサブフレームを入力します。
- その他の設定は全てデフォルト値で問題ありません。
入力が完了したら、”Apply Global”より実行します。
処理が完了すると、位置合わせの終わったサブフレームと、drizzle(後述)用に使用するファイルが出力されます。
スタック
(日本ではコンポジットとも呼ばれます。Integrationとも呼びますが、日本語ではインテグレーションと書いてあるのをあまり見ません。本ブログではすべて「スタック」で呼称を統一します。)
位置合わせの終わったサブフレームを平均化し、最終画像を得ます。これにより、ランダムな値を取るノイズは平均化され、ノイズの少ない画像を得ることができます。さらに、各サブフレームの中で統計的に異常な値を取っているピクセルを検出し、それをスタックから除外(rejection)することで、人工衛星や放射線のヒットなどといった異常ピクセルを取り除くことができます。
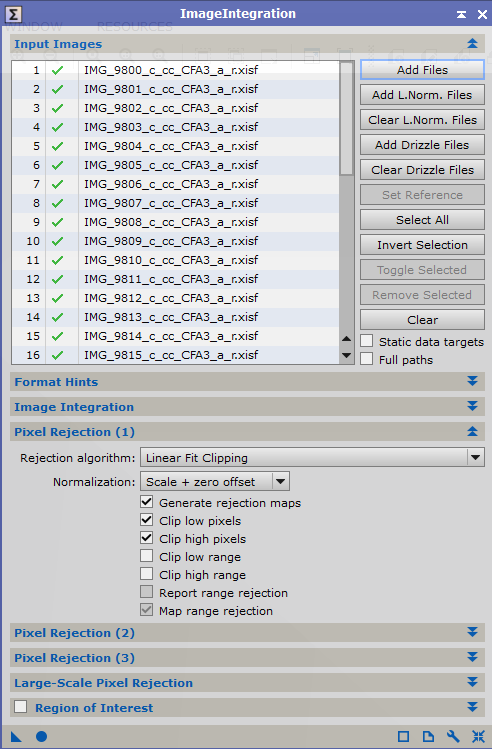
“PROCESS” → “ImageIntegration”を起動し、次の設定を行います。
- Input Images: Add Files より、位置合わせの終わったサブフレームを読み込みます。
- Input Images: Add Drizzle Filesより、位置合わせで生成されたdrizzle用のファイルを読み込みます。
- Image Integration: Combination をAverageとします。(加算平均)
- Normalization: Additive with scaling とします。(加算的なnormalization)
- Weights: FITS keyword を選択し、keywordには “SSWEIGHT”と入力します。
- Pixel Rejection: Rejection algorithmを選択します。条件に合わせて使い分けます。詳細は公式サイトの資料を参照ください。
- 入力されるサブフレームの枚数が15枚未満: Winsorized Sigma Clipping (非推奨)
- 入力されるサブフレームの枚数が15枚以上: Linear Fit Clipping (推奨)

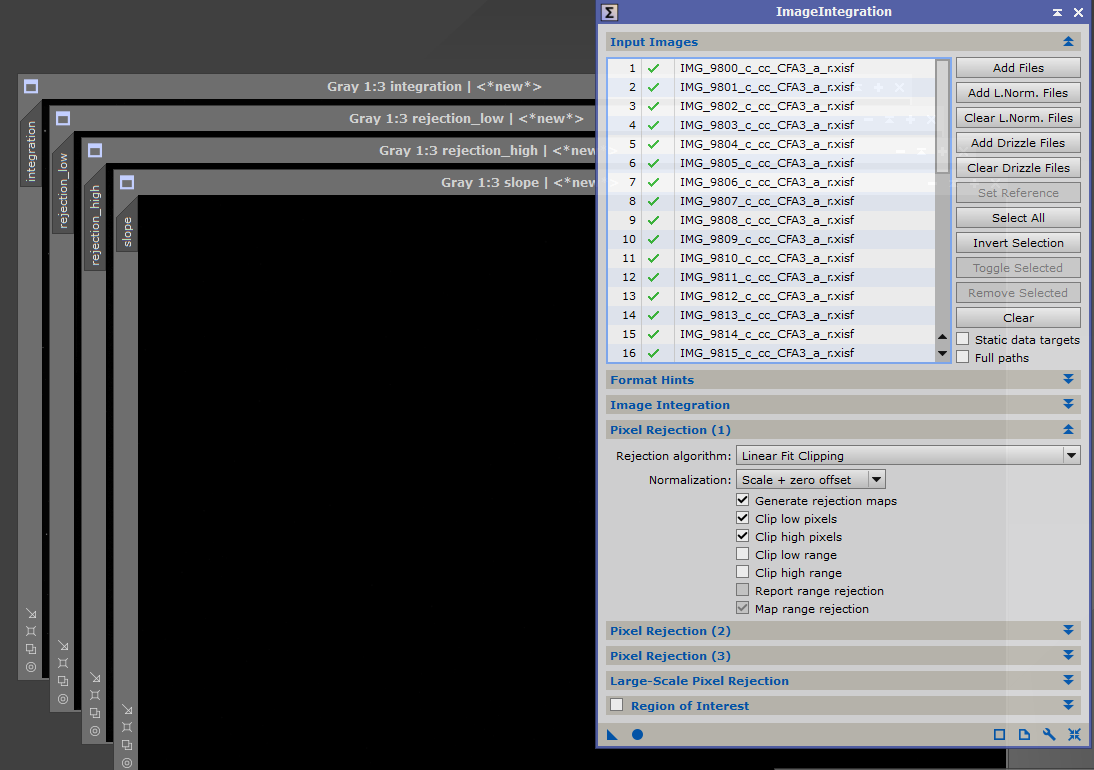
処理が完了すると、スタックされた画像と、rejectionされたピクセルのマップが表示されます。すべて使いませんので、ウィンドウを閉じておきます。
また、入力したdrizzle用のファイルがアップデートされています。こちらをdrizzle処理の際に使用します。
Drizzle
Drizzleは、スタックしているサブフレームから、サブピクセルの情報を補間することで、解像度を上げようとする処理になります。大顧問のブログにて詳細が語られておりますので、ぜひご覧ください。
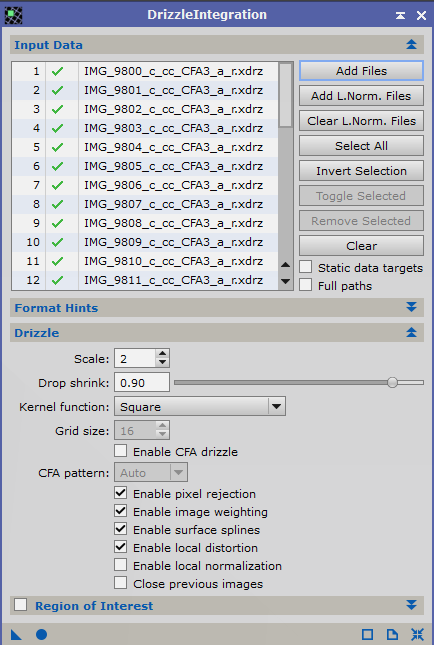
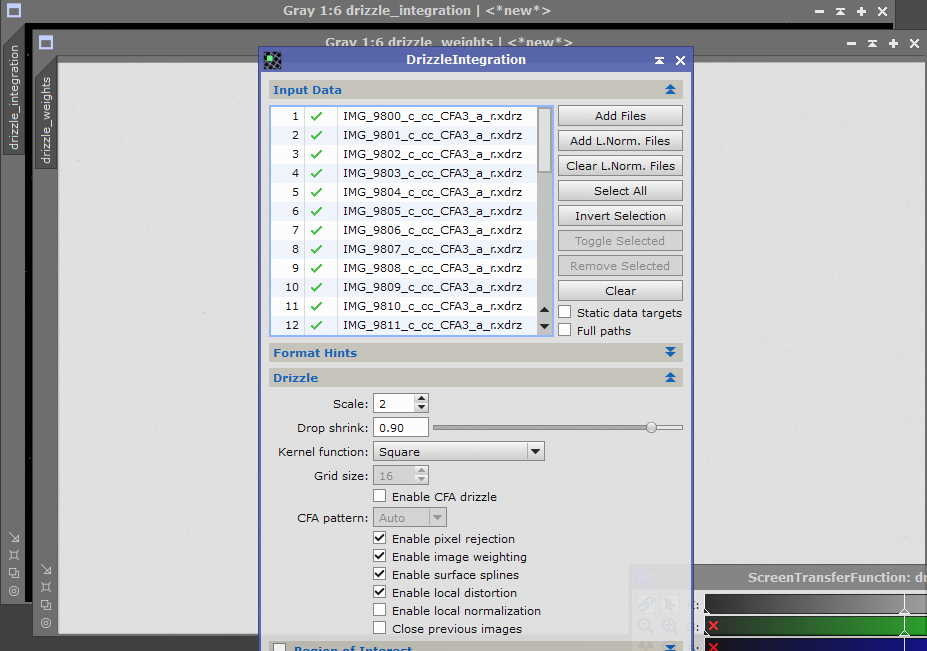
PROCESS” → “DrizzleIntegration”を起動し、次の設定を行います。
- Input Data: Add Files よりdrizzleファイル(.xdrz)を読み込みます。
- Drizzle: Scale を設定します。通常は2倍が良いと思われます。
- その他の設定はデフォルト値のままで問題ありません。
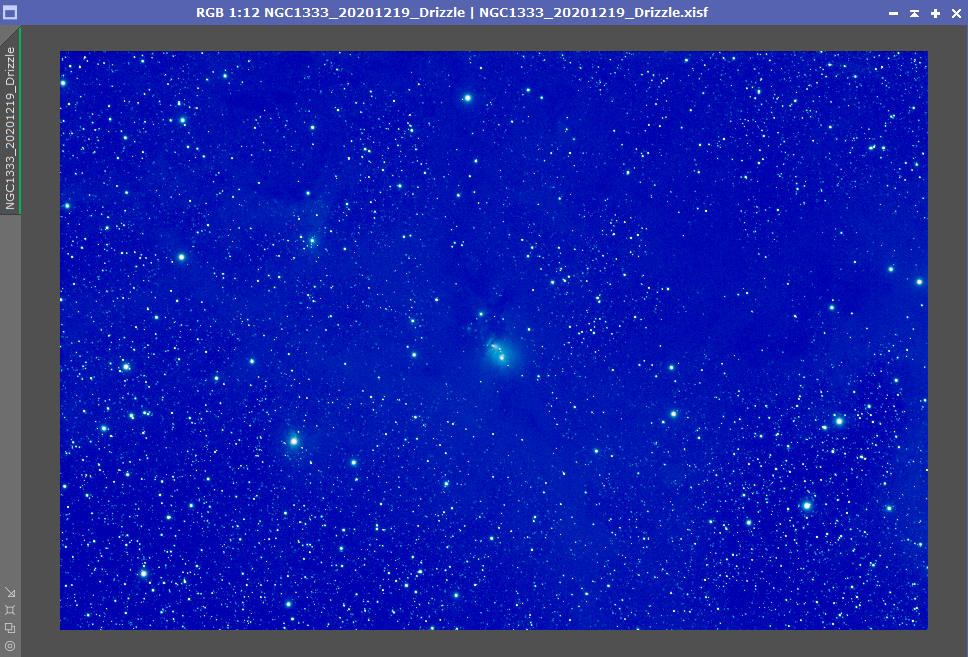
処理が完了すると、最終画像と重みづけのmap(?)が表示されます。後者は使用しませんので破棄します。最終画像を32 bit xisfファイルとして保存しておきます。
色合わせ
デジタルカメラで撮影した画像は、通常カラーバランスが大きく崩れています。特に、撮影時にフィルターを使用した場合は、著しくカラーバランスが崩れることがあります。この画像を妥当な色にするため、色合わせを行います。色合わせでは、「バックグラウンドと考えられる領域」「白いと考えられる領域」を自動検出し、カラーバランスを決定します。そのため、色合わせは2段階にて行います。
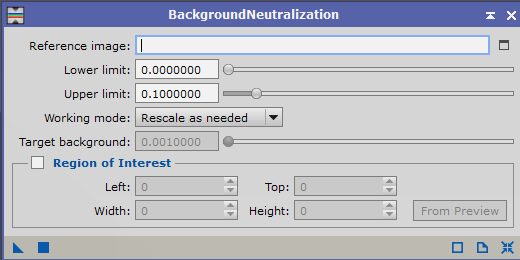
- BackgroundNeutralization: 天体写真の背景は宇宙空間であることから、その色はニュートラルグレーに近いと考えられます。そこで、背景をニュートラルグレーにすることで、大まかな色合わせを行います。これにより、色合わせの計算時に「バックグラウンドと考えられる領域」の色がニュートラルグレーに近くなります。
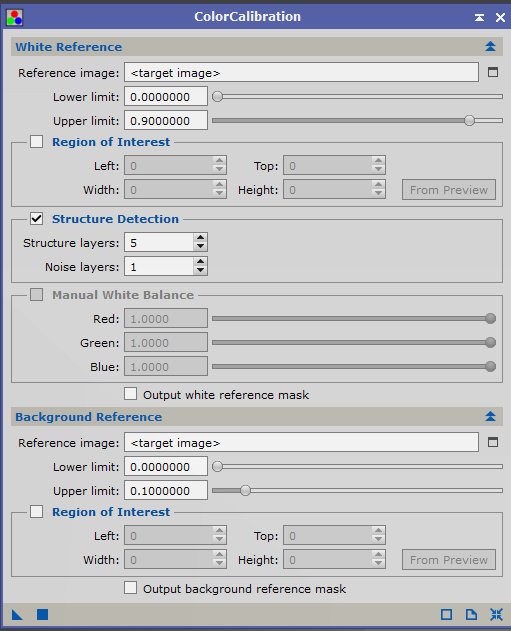
- ColorCalibration: 色合わせに使用する領域を自動検出し、カラーバランスを決定します。
(STFのLinked stretchにより、カラーバランスを保持したまま仮ストレッチしている)

(仮ストレッチ方法は同左)
PhotometricColorCalibration (PCC) について
PixInsightには、PhotometricColorCaibration (以下PCC)と呼ばれるプロセスがあります。このプロセスは、カラーバランスを決定する際に、写真内に写っている恒星のスペクトルを基準としています。詳細はNiwa氏のブログが詳しいですので、ぜひご覧ください。
ここでは、PCCを使用しない色合わせの手順を記載します。
BackgroundNeutralization
PROCESS” → “BackgroundNeutralization”を起動し、Drizzleが完了した画像へ◣マークをドラッグアンドドロップして適用します。(パラメータはデフォルト値とします。)
ColorCalibration
PROCESS” → “ColorCalibration”を起動し、BackgroundNeutralizationが完了した画像へ◣マークをドラッグアンドドロップして適用します。(パラメータはデフォルト値とします。)
前処理完了
前処理にて得られた画像は、デジタルカメラに記録された「真の意味での」RAWデータを基としているため、非常に暗い画像のままです。(リニアデータと呼びます)
そこで、後処理と呼んでいる一連のプロセスでは、この画像を出発点として、適正な明るさにするストレッチ、星雲や恒星の強調処理、ノイズ処理などを行い、仕上げていきます。
後処理の手順については後日記載していきます。
以上にて前処理が完了となります。最後までお読みいただきありがとうございました。
→後処理編へ続く
“【連載】PixInsightを使った天体写真の画像処理④ 前処理(3)” への2件の返信