ニュートン式望遠鏡の光軸調整(1)考え方
目次
概要
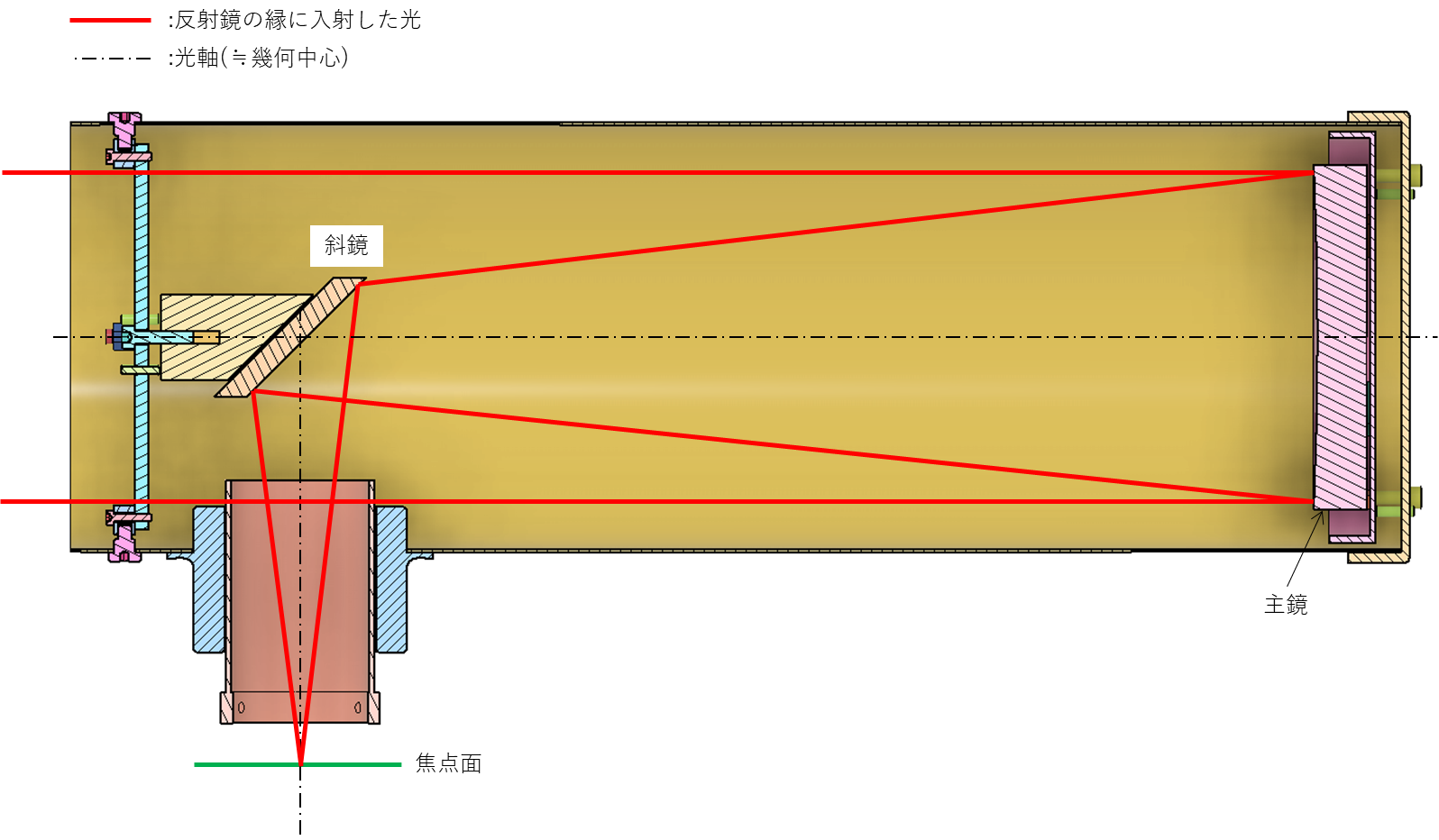
ニュートン式望遠鏡(Fig. 1)は反射型望遠鏡の1種で、主鏡と光軸を90°に折り曲げる斜鏡の2枚の反射鏡からなる光学系です。明るい大口径の鏡筒が比較的安価に入手可能なこと、高性能なコマコレクタの登場により、眼視/撮影両面に適しており、人気があります。しかしながら、ニュートン式望遠鏡を扱う上で大きな課題が1つあります。それは光軸調整です。光軸調整に関する情報は書籍やインターネットにあふれていますが、私はどれを読んでも良く理解できませんでした。それでも様々な記事や書籍を見比べながら手元の鏡筒をいじくり回したり、様々な方に教えていただいたりする中で、ようやく少しずつ理解が進んできたように感じています。今回の記事では、そんなニュートン式望遠鏡の光軸調整について、私なりの考え方を書いてみようと思います。

光軸調整=各部品の自由度を拘束する操作
光軸調整 = 位置合わせ
光軸とは、レンズや反射鏡の曲率中心が通る仮想線のことを指します。仮想線というのがポイントで、光軸そのものを直接目で見ることはできません。そこで、実際の光軸調整では、反射鏡の曲率中心を反射鏡の幾何中心と(両者が一致しているという前提で)読み替え、それぞれの部品を正しい位置に揃えていくという操作が行われます。(ここが私にとっては1つ目の発見でした。)
つまり、光軸調整とは、各部品を正しい位置に決めていく位置合わせの操作と言い換えることができます。
3次元空間における物体の自由度
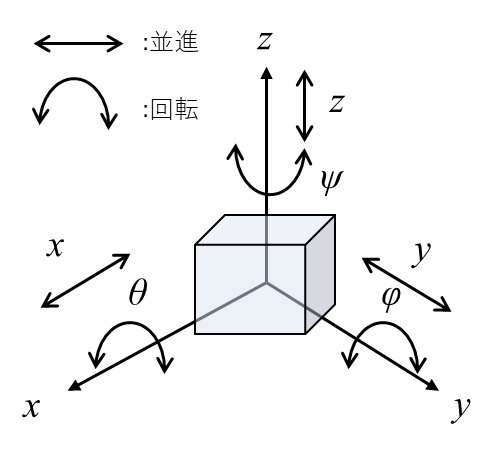
ここで、位置合わせに必要な概念である、自由度について考えてみましょう。3次元空間に存在する物体は6つの自由度(Degree of Freedom, DoF)を持ちます。Fig. 3のような座標系を考えたとき、物体は各軸方向へ並進、または各軸を中心に回転することが可能です。それらの自由度を並進: \(x,~y,~z\), 回転: \(\theta,~\phi,~\psi\)と表記することとします。このように、物体は並進と回転の自由度を持つため、それらを一つ一つ固定していく(自由度を拘束する)ことで、位置合わせが可能となります。(以降、座標系と各軸の名称はFig. 3に従います。)
そして、光軸調整の機構 = 位置合わせの機構は、
①組込時点で自由度が拘束される(調整不可能な位置合わせの機構がある、または位置合わせの機構が付いていないため、ユーザ側が調整できない )
②ユーザが調整することのできる(位置合わせの機構が付いており、ユーザ側で調整が可能)
機構の2つに分けられます。
次に、ニュートン式望遠鏡の構成要素と、位置合わせの機構について見ていきます。
各部品の位置決め
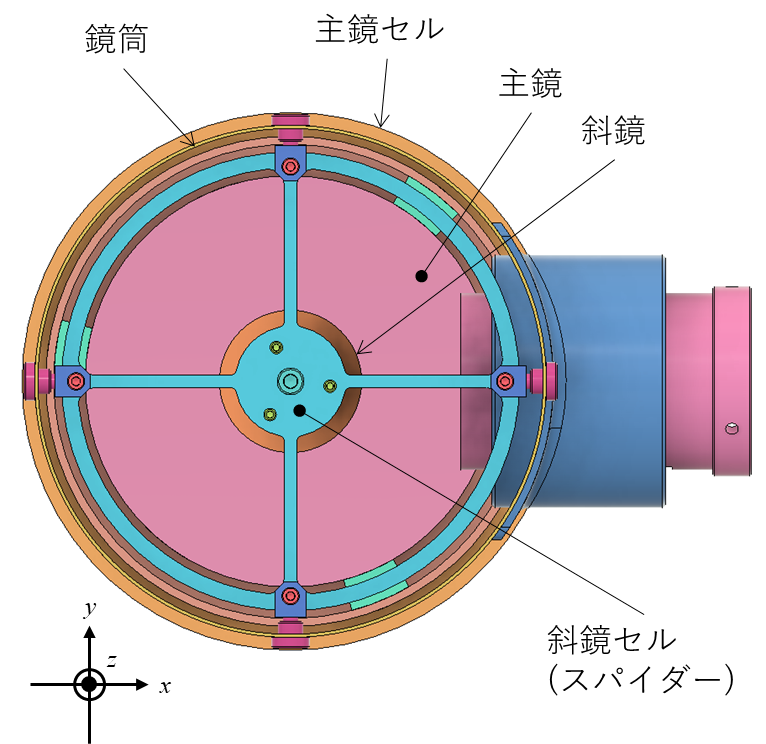
Fig. 4 – 6にニュートン式望遠鏡の各部品を示します。説明を加えた部品が、調整する部品となります。以下、各々の部品について、位置決めの機構を見ていきます。実際の光軸調整においても、上から下の順に、調整していくこととなります。位置決めにはその基準が必要ですが、この場合基準となるのは鏡筒(鏡筒に対する接眼体の位置はユーザ側が調整不可能で、正しい位置にあるものとする)となります。鏡筒を基準とした、各部品の位置をみていきます。

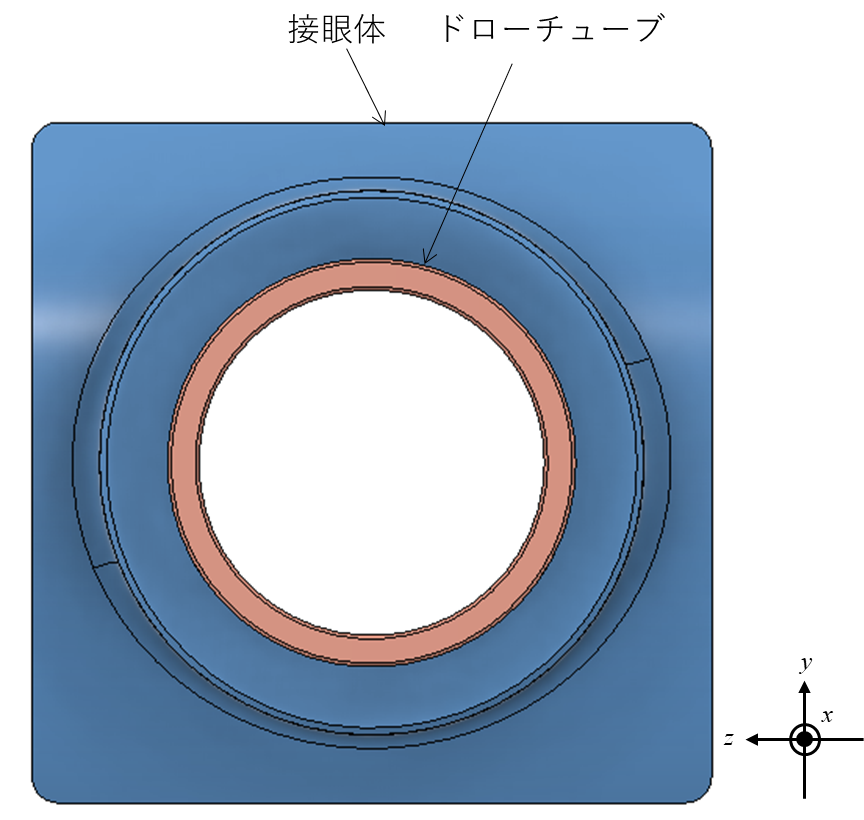
接眼体に対するドローチューブの位置
次に、各部品同士の位置合わせを個別に見ていきます。本来であれば、鏡筒に対する接眼体の位置合わせがありますが、前述の通り、基本的に調整可能な自由度がないため割愛します。表は、位置合わせにおいて調整が可能な軸と可能でない軸、調整方法についてまとめたものです。ただし、鏡筒の構造によっては調整ができない軸があったり、調整を推奨していない軸があったりすることはご了承ください。
はじめに、接眼体に対するドローチューブの位置について考えてみます。
| 調整可否 | 調整方法 | 備考 | |
| x | ○ | ピントノブを回す | ピント合わせと同義 |
| y | × | – | 中心ずれしないようベアリングで受けていることが多い |
| z | × | – | 中心ずれしないようベアリングで受けていることが多い |
| θ | × | – | – |
| φ | ○ | 押し引きねじ | いわゆるスケアリング調整機構 |
| ψ | ○ | 押し引きねじ | いわゆるスケアリング調整機構 |
\(x\)方向の位置合わせは、(一般的には光軸調整と別に扱われていますが)ピント合わせと同義です。その他には、\(\phi~,\psi\)軸の回転が調整できる機種があります。(いわゆるドローチューブの傾き、スケアリング調整機構と呼ばれているものです。)ちなみに、私はドローチューブの\(\phi~,\psi\)軸については調整したことがありませんが、APS-Cセンサの範囲内では星像は許容範囲内です。(メーカ調整の状態をそのまま使用しています)より明るい光学系や、より大きいイメージセンサを使用する場合は調整が必要になるかもしれません。
調整可否の判定
・○: 調整可能(鏡筒の構造によっては調整不可の場合もあり)
・△: 直接調整できないが、そのずれの影響は別の調整機構を用いて間接的に調整可能
・×: (通常は)調整不可
ドローチューブに対する光軸調整治具の位置
光軸調整には通常十字線入りの光軸調整用アイピースを用いますが、このような光軸調整治具とドローチューブの位置関係が狂っていると、正しい光軸調整ができないことは明らかです。ただし、通常の光軸調整治具は調整機構を備えておらず、加工精度のみで位置が決まることが多いため、できるだけ高精度に加工された光軸調整治具を選ぶしかありません。
| 調整可否 | 調整方法 | 備考 | |
| x | × | – | 調整の必要はない |
| y | × | – | 調整機構がなく、光軸調整治具の加工精度で決まる |
| z | × | – | 調整機構がなく、光軸調整治具の加工精度で決まる |
| θ | × | – | ドローチューブ内で回転できるが、位置合わせとは関係ない |
| φ | × | – | 調整機構がなく、光軸調整治具の加工精度で決まる |
| ψ | × | – | 調整機構がなく、光軸調整治具の加工精度で決まる |
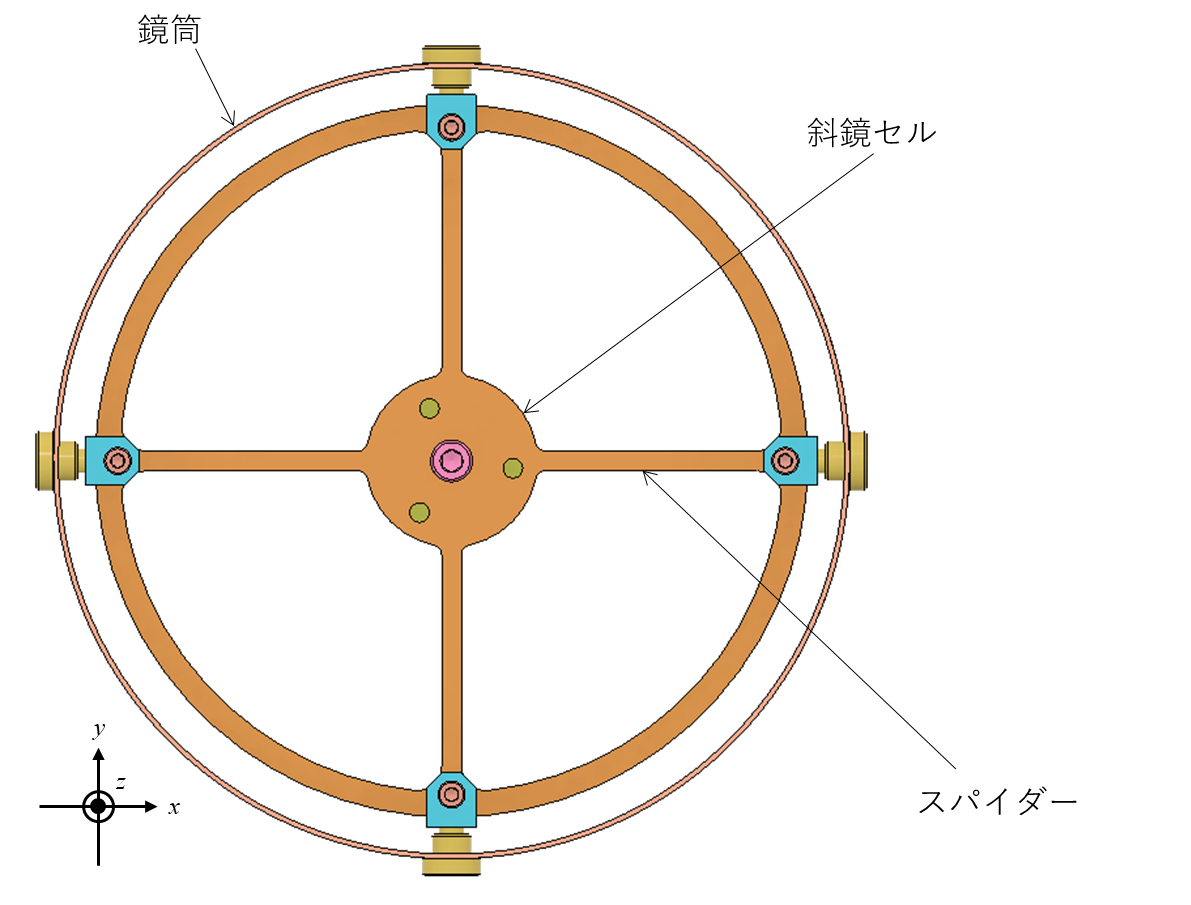
鏡筒に対する斜鏡セル(スパイダー)の位置
次は、鏡筒に対する斜鏡セルの位置合わせです。斜鏡はニュートン式望遠鏡が持つ最大の特徴であり、最大の厄介なポイントともいえるでしょう。斜鏡はスパイダーと呼ばれる部品により光路中に固定されており、6自由度全てがユーザーにより調整可能、逆に言えば、6自由度全てを調整しなければならないことになります。このように、調整するべき自由度が多いという点が、ニュートン式望遠鏡の光軸調整を難しくしている要因といえます。(後述しますが、主鏡の調整するべき自由度は”2″です。)斜鏡の位置は後述する「鏡筒に対する斜鏡の位置」で決めるのですが、鏡筒に対する斜鏡セルの位置関係で、\(x~,y\)の2自由度だけは、「鏡筒に対する斜鏡の位置」の調整段階で調整することができないため、この段階で決めておく必要があります。
| 調整可否 | 調整方法 | 備考 | |
| x | ○ | 引きねじ | 鏡筒の幾何中心と斜鏡セルの幾何中心を一致させる |
| y | ○ | 引きねじ | 鏡筒の幾何中心と斜鏡セルの幾何中心を一致させる |
| z | × | – | 調整不要(斜鏡の光軸調整で\(z\)方向の位置合わせを行う) |
| θ | × | – | – |
| φ | × | – | – |
| ψ | × | – | – |
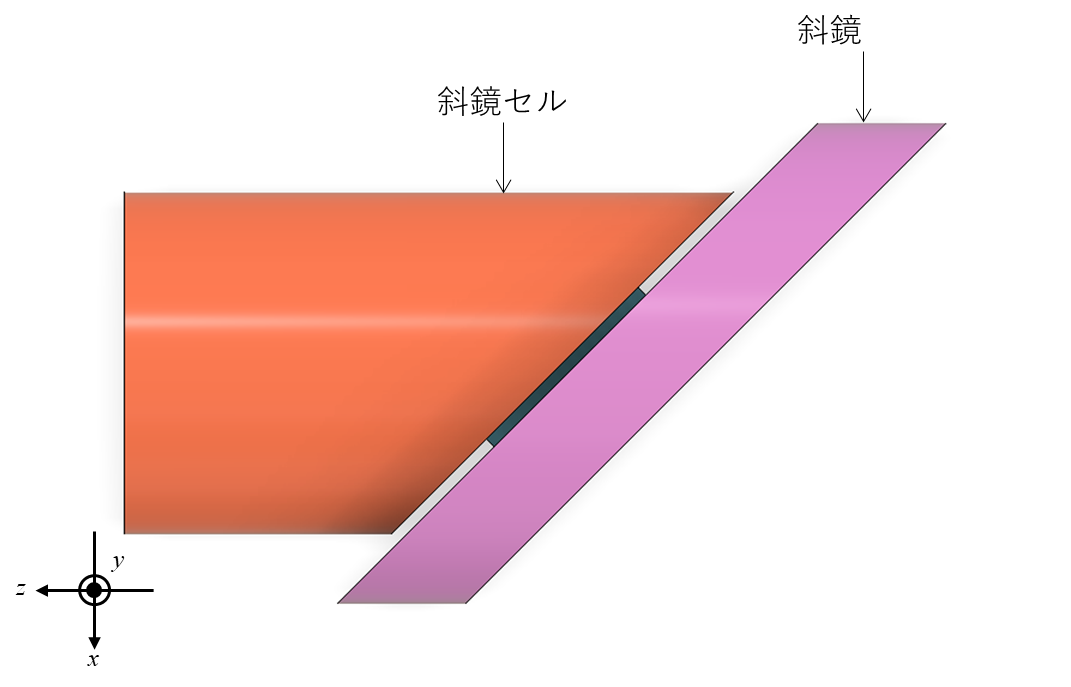
斜鏡セルに対する斜鏡の位置
圧迫による鏡面の変形を防ぐため、斜鏡は両面テープまたは接着剤で斜鏡セルに留められていることが多いです。位置決めの機構を一切持たないため、スパイダーや斜鏡セルの位置を動かすことで、斜鏡の位置合わせを行います。
| 調整可否 | 調整方法 | 備考 | |
| x | △ | – | – |
| y | △ | – | – |
| z | △ | – | – |
| θ | △ | – | – |
| φ | △ | – | – |
| ψ | △ | – | – |
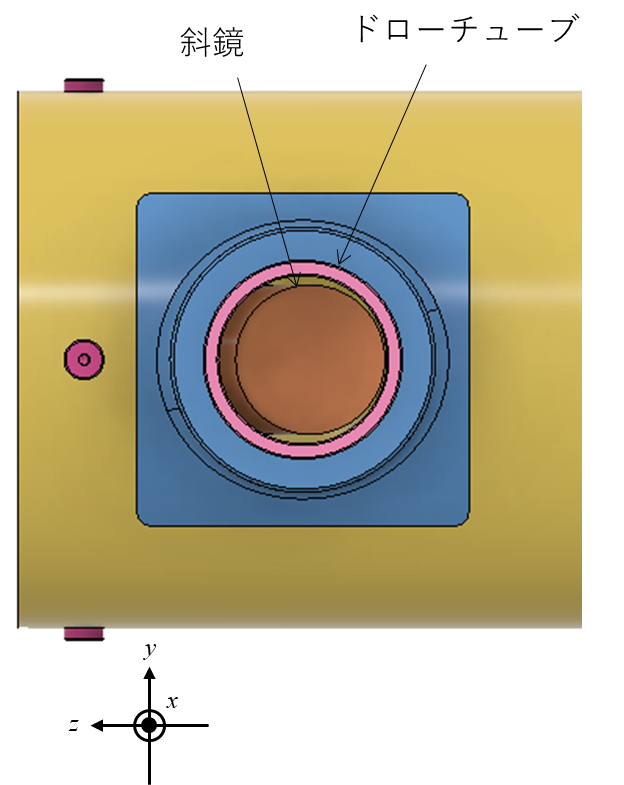
鏡筒に対する斜鏡の位置(いわゆる「斜鏡の光軸合わせ」)
これは、一般的に言われている「斜鏡の光軸合わせ」と同義です。ここで、斜鏡の6自由度を拘束し、斜鏡の位置を決定します。
| 調整可否 | 調整方法 | 備考 | |
| x | △ | – | 「鏡筒に対する斜鏡セルの位置」で調整済 |
| y | △ | – | 「鏡筒に対する斜鏡セルの位置」で調整済 |
| z | ○ | 引きねじ | 3つの押しねじを同じ量緩める/締めて引きねじを動かす |
| θ | ○ | 押しねじ | 3つの押しねじの繰り出し量で調整(いわゆる「斜鏡の傾き」) |
| φ | ○ | 押しねじ | 3つの押しねじの繰り出し量で調整(いわゆる「斜鏡の傾き」) |
| ψ | ○ | 手で回転 | 引きねじを緩めて手で回転させる |
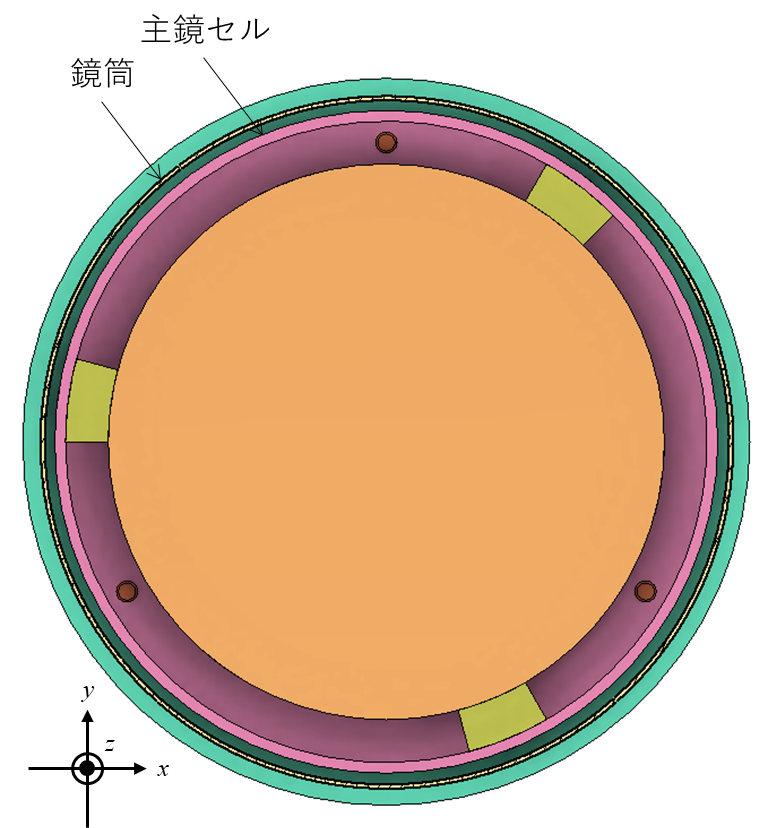
鏡筒に対する主鏡セルの位置
鏡筒に対する主鏡セルの位置は、通常変えることはないうえ、鏡筒に組み込んだ時点で決まってしまいます。位置ずれについても「鏡筒に対する主鏡の位置」で調整可能なため、重要ではありません。
| 調整可否 | 調整方法 | 備考 | |
| x | × | – | – |
| y | × | – | – |
| z | × | – | – |
| θ | × | – | – |
| φ | × | – | – |
| ψ | × | – | – |
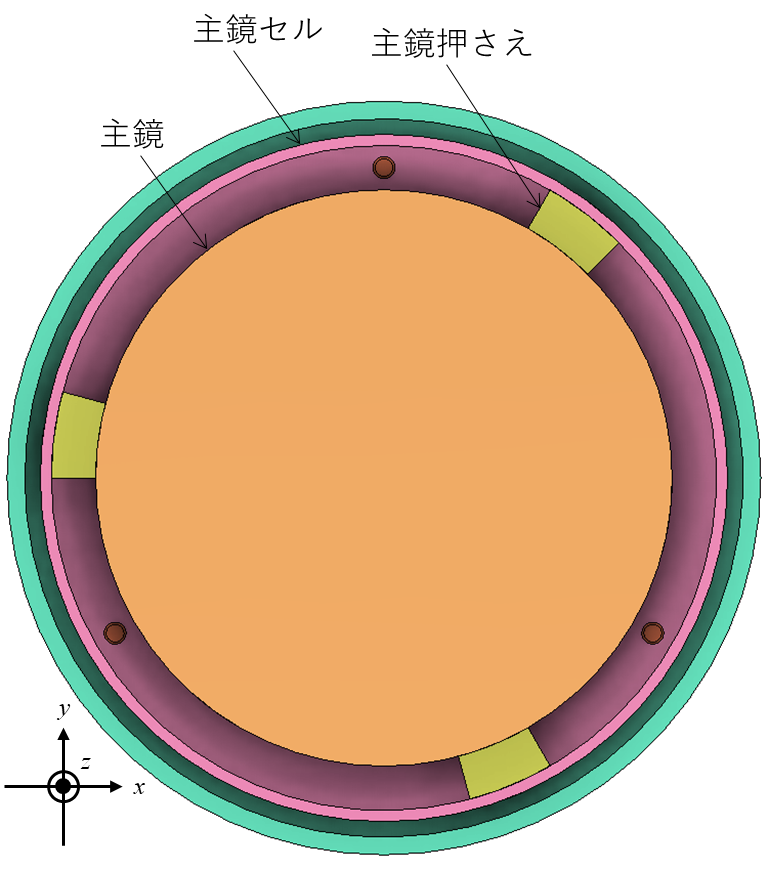
主鏡セルに対する主鏡の位置
主鏡セルに対する主鏡の位置についても、通常は変えないことが多いでしょう。主鏡は主鏡押さえによって側面から固定される構造が多く、主鏡の圧迫を防ぐために、コルクやゴムのシートを介して弱い力で押さえられています。主鏡の\(x,~y\)方向の位置については、主鏡押さえにより主鏡を固定する際に決まりますが、後述する「鏡筒に対する主鏡の位置」でも調整できないうえ、位置決めの機構もないため、大まかな位置を規制することしかできません。強いて言えば、主鏡セルから主鏡を取り外し、再度組付けする際は、主鏡押さえを一つずつ、少しずつ締めこんでいき、できるだけ中心ずれしないように気を付けています。
| 調整可否 | 調整方法 | 備考 | |
| x | (○) | 主鏡押さえ | 位置の微調整はできない(不要?) |
| y | (○) | 主鏡押さえ | 位置の微調整はできない(不要?) |
| z | △ | – | 「鏡筒に対する主鏡の位置」で調整 (不要?) |
| θ | △ | – | 「鏡筒に対する主鏡の位置」で調整 |
| φ | △ | – | 「鏡筒に対する主鏡の位置」で調整 |
| ψ | × | – | (理想的には、主鏡は\(\psi\)軸に対して回転対称なため)不要 |
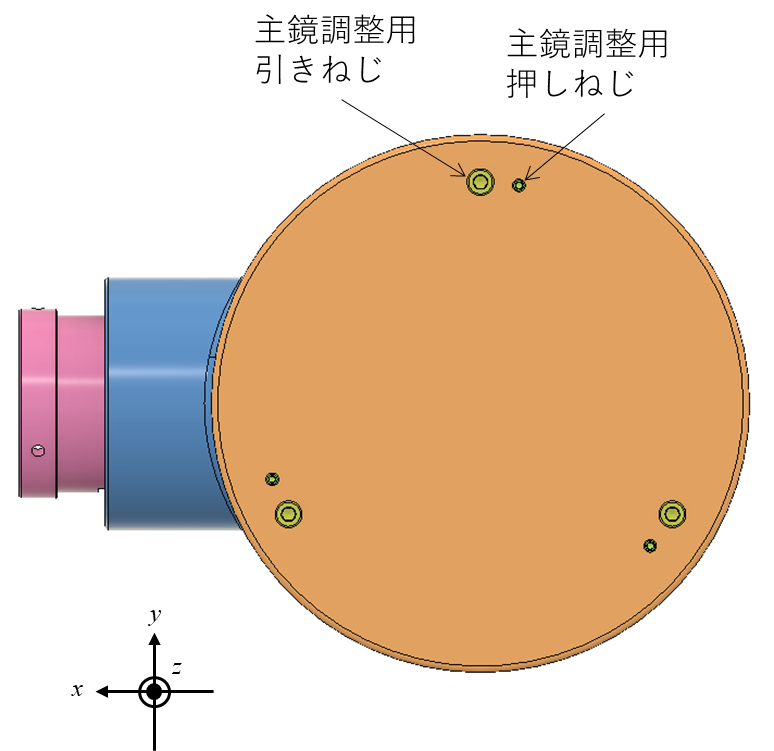
鏡筒に対する主鏡の位置(いわゆる「主鏡の光軸合わせ」)
最後に、鏡筒に対する主鏡の位置を調整します。これが一般的に言われる「主鏡の光軸合わせ」に該当します。先ほど「主鏡セルに対する主鏡の位置」で出てきた\(\theta,~\phi\)の2自由度を拘束して完了です。
| 調整可否 | 調整方法 | 備考 | |
| x | × | – | – |
| y | × | – | – |
| z | (○) | 押し引きねじ | \(z\)方向の位置ずれが光軸の状態に影響するかは不明(関係しない?) |
| θ | ○ | 押し引きねじ | 3つの押しねじの繰り出し量で調整(いわゆる「主鏡の傾き」) |
| φ | ○ | 押し引きねじ | 3つの押しねじの繰り出し量で調整(いわゆる「主鏡の傾き」) |
| ψ | × | – | (理想的には、主鏡は\(\psi\)軸に対して回転対称なため)不要 |
まとめ
以上の考察をまとめると、ニュートン式望遠鏡の光軸調整の手順と方法が見えてきます。次のような手順になります。一般的な光軸調整のマニュアルに書かれている内容、手順と一致しました。
- 接眼体ードローチューブ: \(\phi,~\psi\)
- 鏡筒ー斜鏡セル(スパイダー): \(x,~y\)
- 鏡筒ー斜鏡: \(z\)
- 鏡筒ー斜鏡: \(\psi\)
- 鏡筒ー斜鏡: \(\theta,~\phi\)
- 鏡筒ー主鏡: \(\theta,~\phi\)
今回は光軸調整の考え方について書いてみましたが、次回は、上の内容を基に、実際の光軸調整の手順について書いてみたいと思います。・・・続く?