直焦点撮影の手順 (2)
前回に引き続き、私がとっている直焦点撮影の手順を書いていきます。
(画像はクリックすると拡大します。)
目次
手順③ 極軸合わせ
- 目視にて、赤道儀がおおよそ北極星の方向を向いていることを確認します。できれば、極軸望遠鏡の視野中央付近に北極星が導入されていることを確認しておくと、次以降の手順がスムーズになります。
北極星がどれかわからない場合は、Google skyなどのアプリが有用です。 - 赤道儀の赤経軸を回転させ、図1の状態にし、クランプを締めます。鏡筒の開口部が北を向き、バランスウェイトが下側に来るこの姿勢が、いわゆる”ホームポジション”と呼ばれます。(ホームポジションの定義は赤道儀のメーカーによって異なる場合があるようです。)
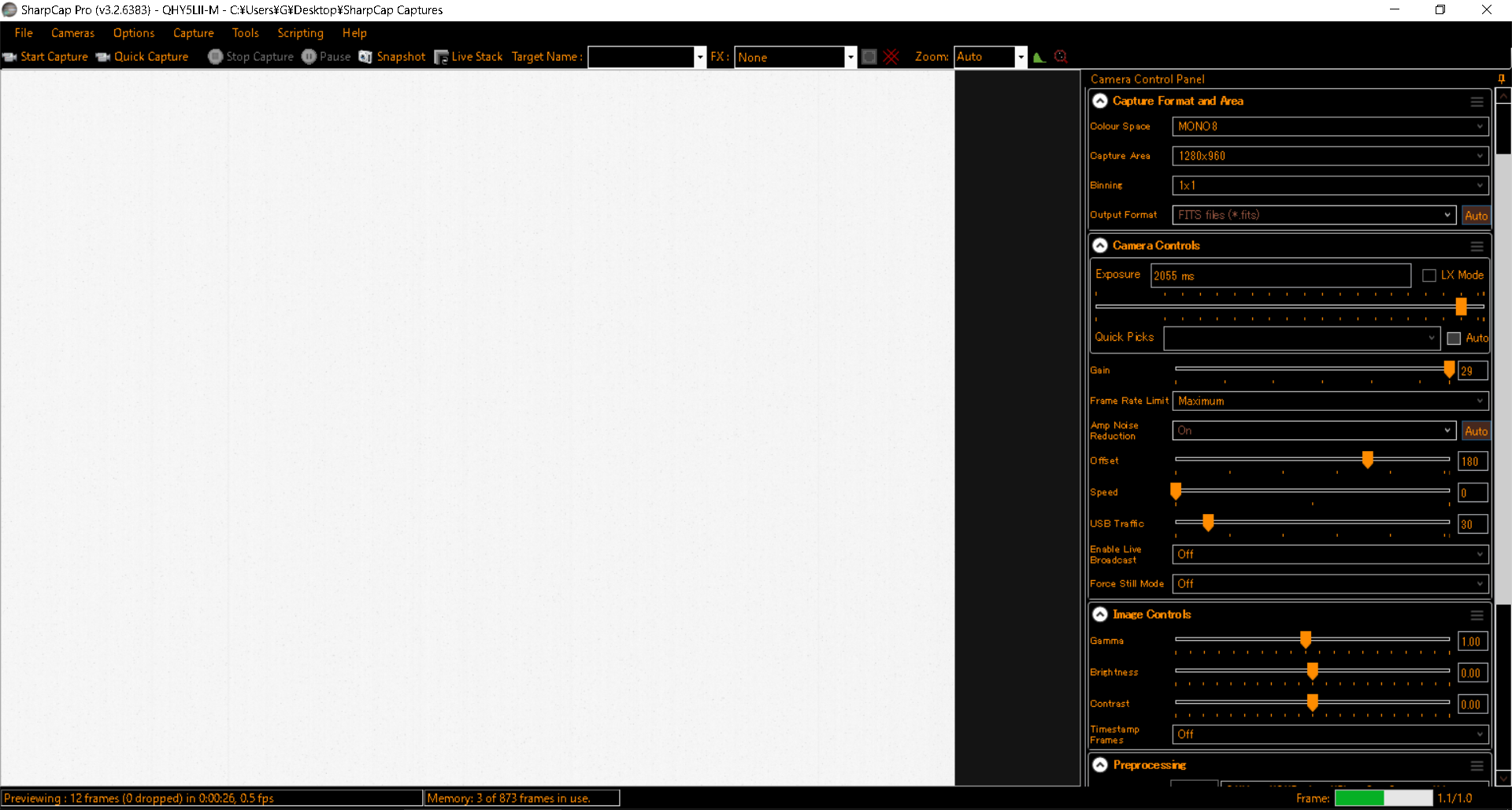
- PCを起動し、SharpCapを起動します(図2)。
- ガイドカメラ(QHY5L-IIM)を接続し、”Polar alignment”を起動します(図3)。
設定画面の”Automatically advance to the next…”にチェックを入れておきます。
(ガイドカメラのダークフレームを撮影していない場合は、あらかじめ撮影し、”Subtract Dark”よりダークフレームを読み込んでおきます。) - 起動すると、自動的に写野内の星をPlate solvingし、鏡筒がどちらの方向を向いているかを示してくれます。このとき、星像の検出に失敗する場合は、ガイドカメラのGainや露光時間を調節します。特に、ダークフレームの減算は重要です。私は、下記の設定にて行っています。
- Gain: 29
- Exposure time: 1-4 s (Plate solvingに失敗する場合は適宜変更する)
- (そのほかの設定はデフォルト値としています。)




6. Plate solvingに成功すると、”Rotate RA axis”と表示されます(図4)。この状態になったら、赤道儀の赤経軸を約90°回転させます。(大体で構いません)
7. 自動的に極軸のずれ量が計算され、特定の星を矢印の方向へ動かすよう指示されます(図5)。この状態になったら、赤道儀の「高度・方位調節ねじを」動かして、矢印の方向へ星を動かします。(赤経・赤緯軸を動かさないよう注意してください。)
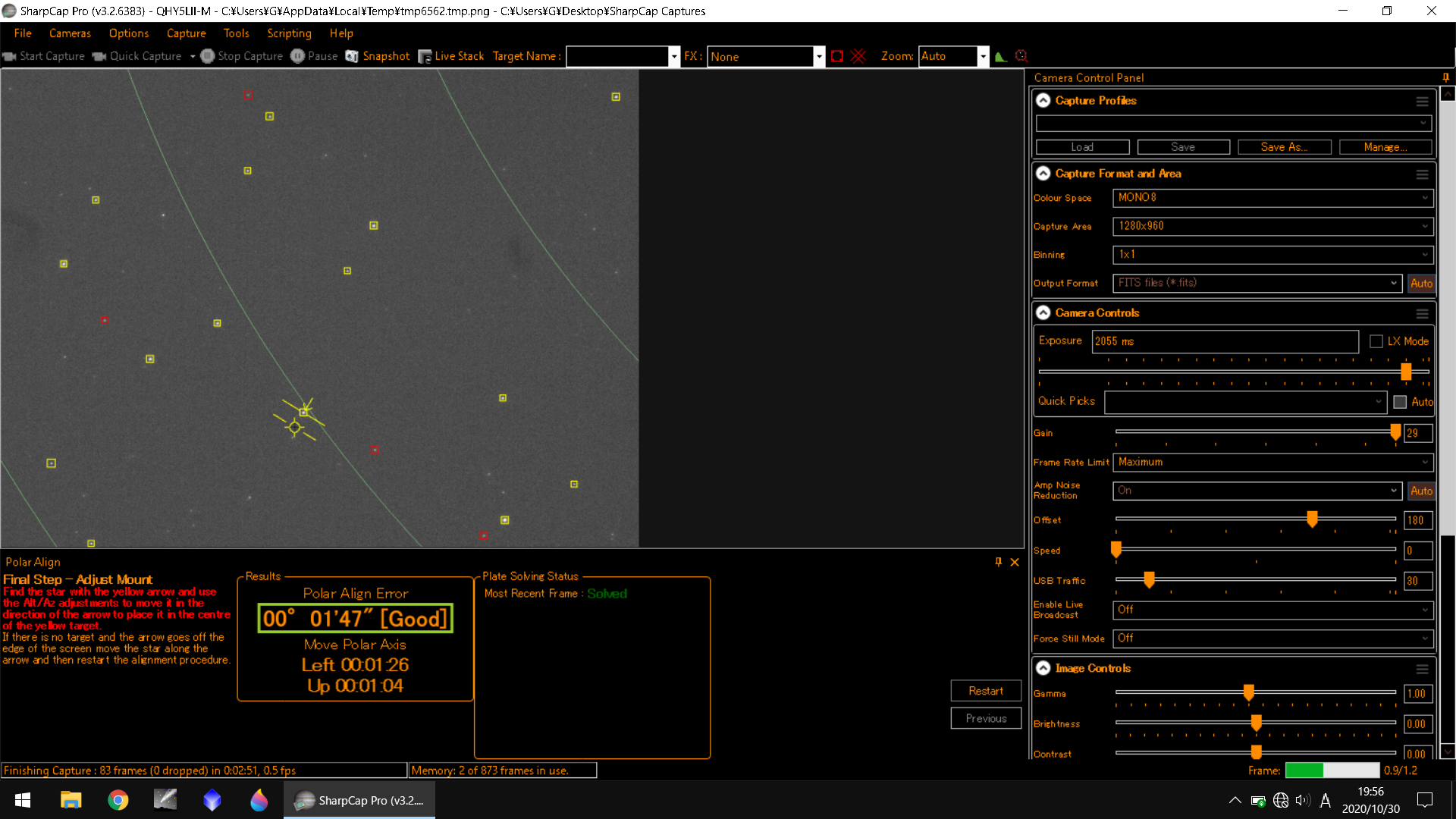
8. ずれ量が一定以下になったら(図6)、SharpCapを終了します。(私は2’以内を目安としています。)
赤道儀の設置は以上で完了です。再度、以下の項目をチェックしたうえで、手順④に進みます。特に、すべての接続部が緩んでいないことを、何度も確実に確認していきます。
- ホームポジション: 鏡筒が図1の姿勢となっているか
(ホームポジションの記載がない機種では、若干ホームポジションがずれていても構いません) - 固定ねじ類が確実に締まっているか
- 鏡筒バンド
- 鏡筒固定ねじ(アリガタ・アリミゾ)
- ガイド鏡の固定ねじ
- カメラマウント(Tリング)
- 高度・方位調整ねじ
- 赤経・赤緯クランプ
- ケーブル類は間違いなく接続されているか
- 赤道儀⇔電源: 電源ケーブル(赤道儀の電源スイッチがオフになっていることを確認してから差し込む)
- 赤道儀⇔リモコン
- ガイドカメラ⇔PC: USBケーブル(マジックテープで鏡筒へ固定する)
- カメラ⇔モバイルバッテリー: DCカプラのケーブル
- カメラ⇔PC: USBケーブル
手順④ アライメント・ピント合わせ
- 極軸を合わせたら、ホームポジション(図1)に戻し、APTを起動します。その間に、赤道儀の電源をオンにしておきます。
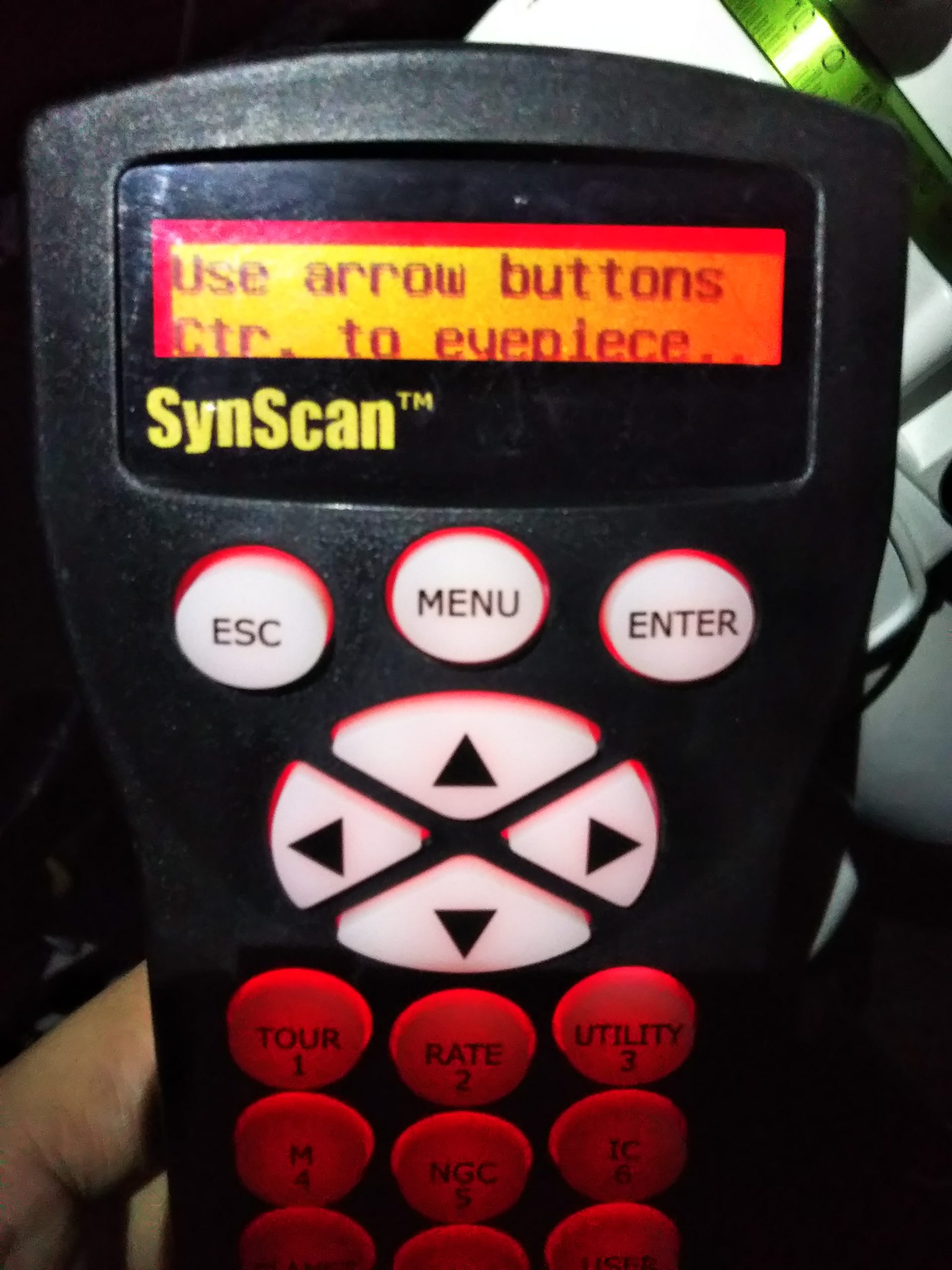
- 赤道儀のリモコンより、日時・観測地の経緯度・標高をセットします。
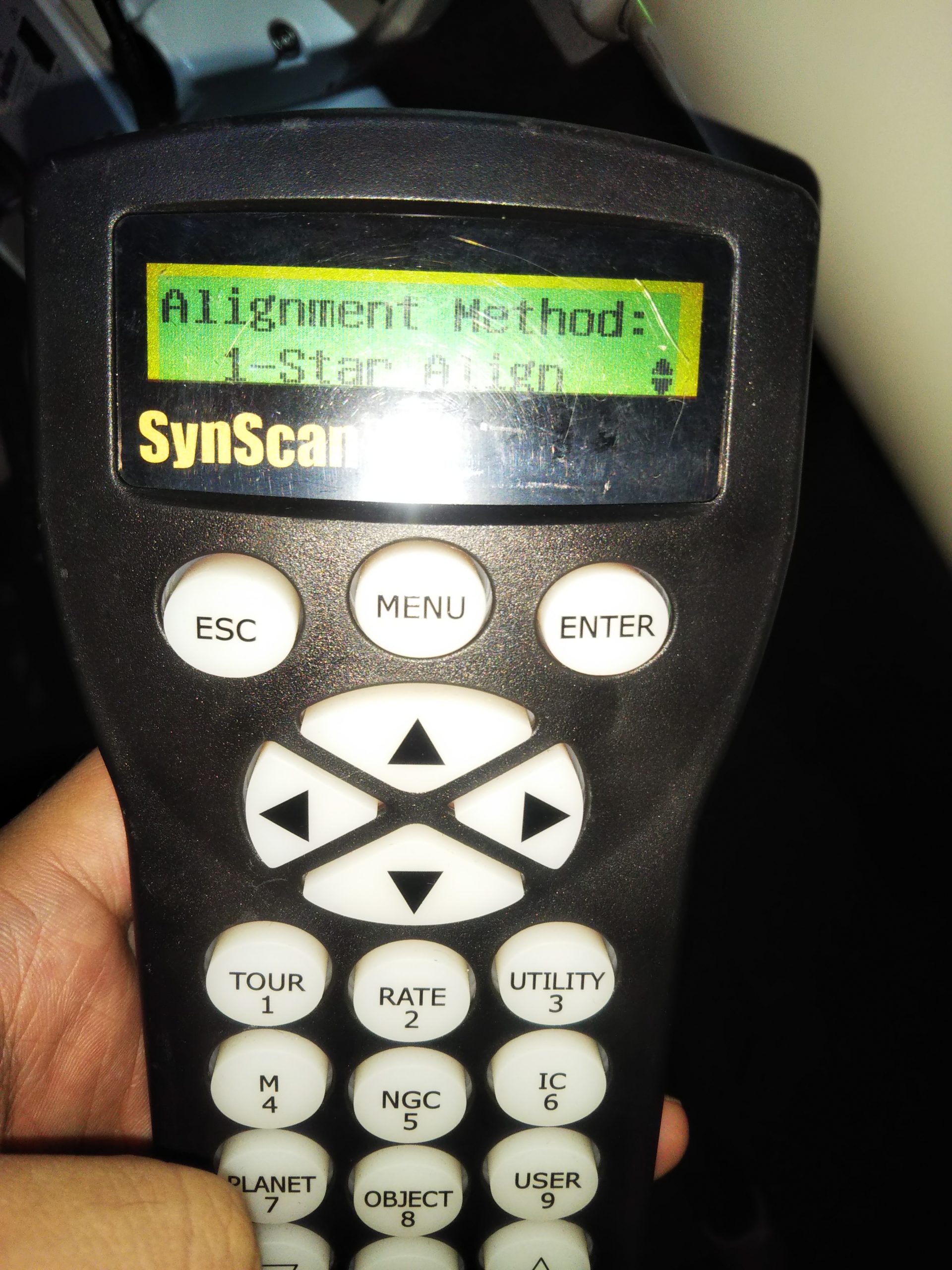
- アライメント画面が表示されたら、”1-Star Alignment”を選択し、開始します。自動的に鏡筒がSlewされ、アライメントする星 (例: カペラ)を導入します。

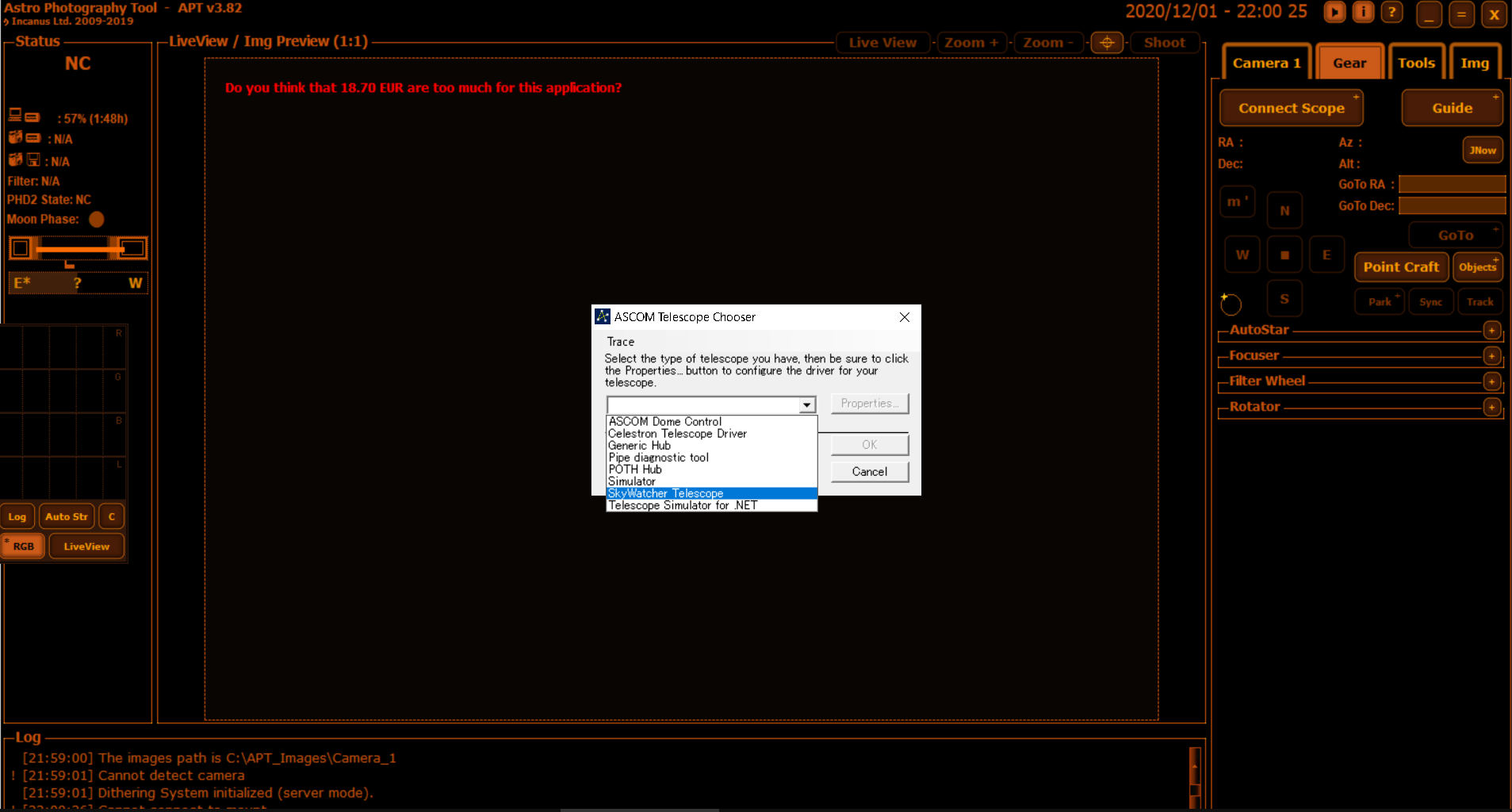
- アライメントする星が導入されたら、導入補正を行います。リモコンをPCと接続し、赤道儀をAPTと接続します。併せて、カメラの電源をオンにし、APTと接続します。
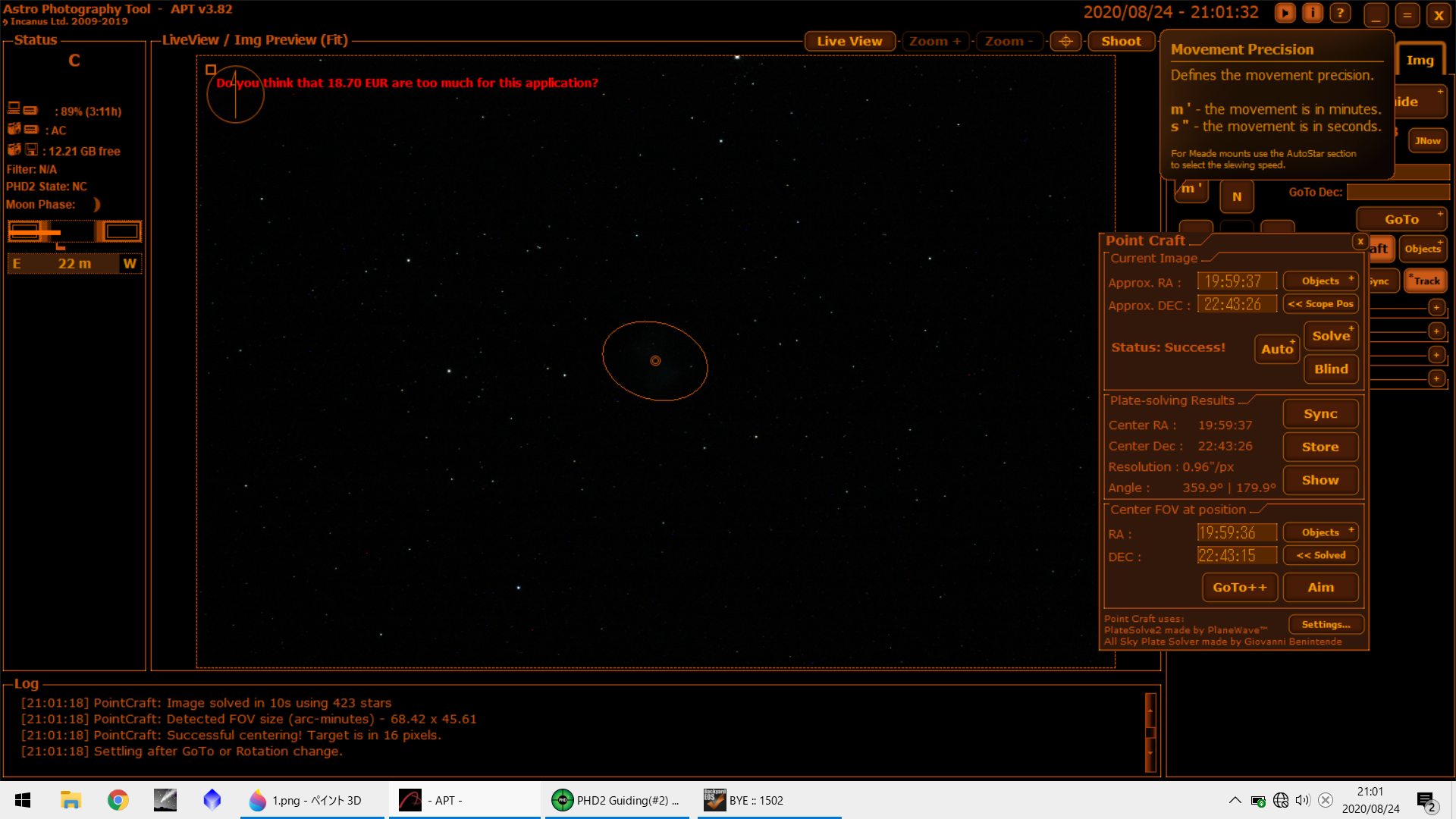
- “Point Craft”を表示させ、”Center FOV~”内の”Objects+”より、アライメントする星と同じもの (例: カペラ)を導入します。”GoTo++”をクリックすると、赤道儀のSlew, カメラの撮影, Plate solving, Sync, re-slew, カメラの撮影, Plate solvingというサイクルを繰り返します。この操作により、アライメントする星が写野の中央へ導入されます。
- 導入補正が完了したら、赤道儀のリモコンよりアライメントを確定させます。
(確定させなくても大きな影響はありません。また、この手順以降リモコンは使いませんのでリモコンホルダーへ格納します。)
“Point Craft”は表示したままにしておきます。

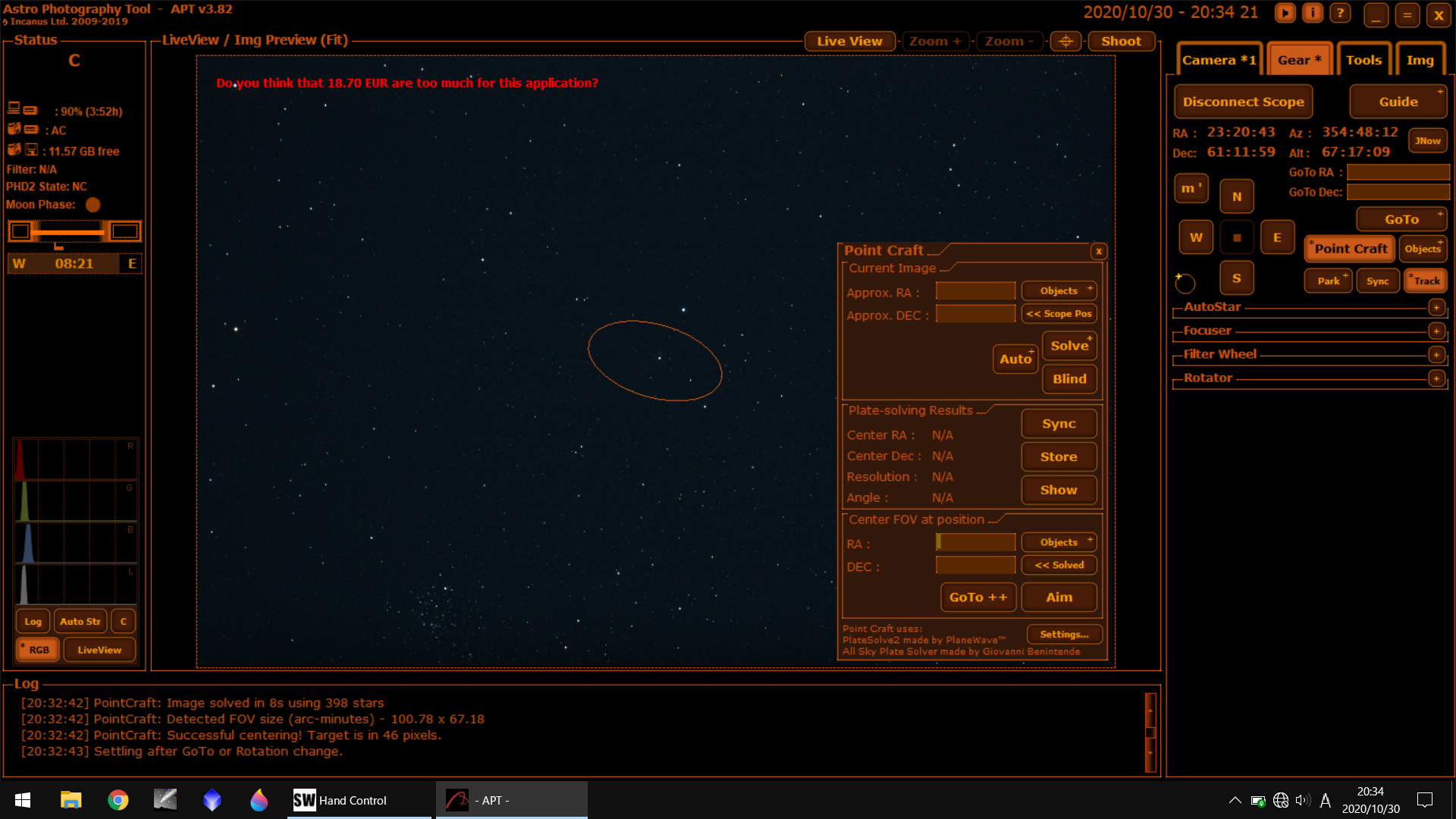

- カメラの回転角度を調整します。図13のPlate solving結果より、現在の写野の上がどの方角を向いているかが表示されています。
この値を見ながら、カメラを回転させ、所望の角度になるまで”Goto++”を繰り返します。私は、±1°以内を基準として追い込んでいます。
通常は、北が上(0°または180°)か、東が上(90°または270°)にすることが多いと思います。 - ピント合わせを行います。鏡筒の開口部へバーティノフマスクを装着します。

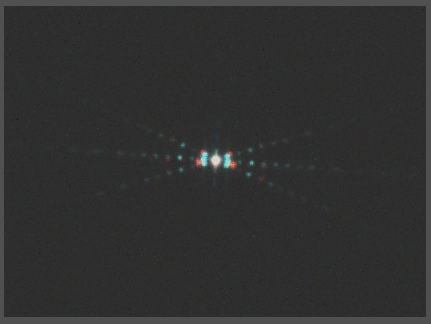
8. カメラのライブビューをONにし、輝星の周囲に現れる光条の状態を確認します。図1のように、3本の光条が中央で交わっていればOKです。交わっていない場合は、ピント調節ノブを動かしながら、ピントを合わせます。
9. ピント固定リングを締め、再度ピントを確認したら、バーティノフマスクを取り外します(重要)。これを取り忘れたまま撮影してしまうと、せっかくの露光時間がすべて台無しになってしまいます。
また、ピント固定リングを締めた際にピントが移動することがあります。自分の光学系のくせを掴んでおき、適切なピント固定リングの締め付けトルクをつかんでおくと良いと思います。
手順⑤ 対象の導入
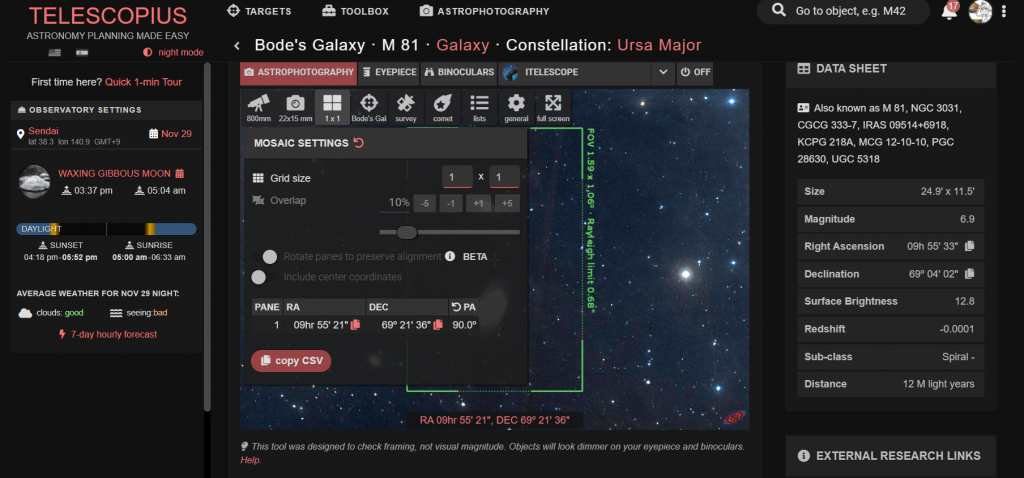
- “Point Craft”を表示させたまま、導入したい写野の中央の座標(RA, Dec)を入力します。座標を決定するにあたっては、Telescopiusというサイトが有用です。こちらのサイトを使用して、事前に座標を調べておきます。
2. “Goto++”を実行します。
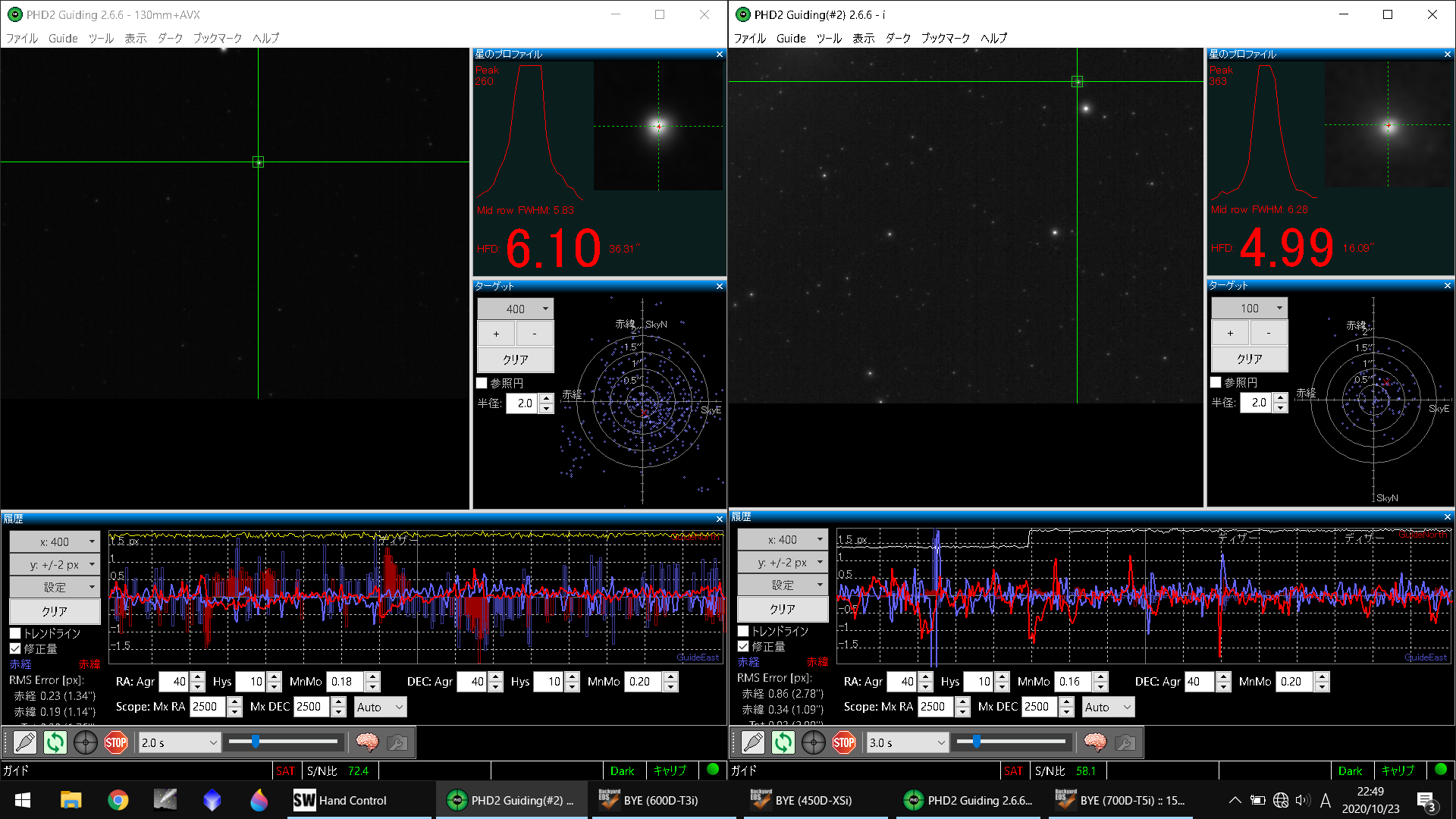
手順⑥ オートガイドのセットアップ
- PHD2とBYEを起動します。
- BYEとカメラを接続します。
- PHD2を開き、機器と接続します。APTと同様、赤道儀との接続はASCOM経由で行っています。
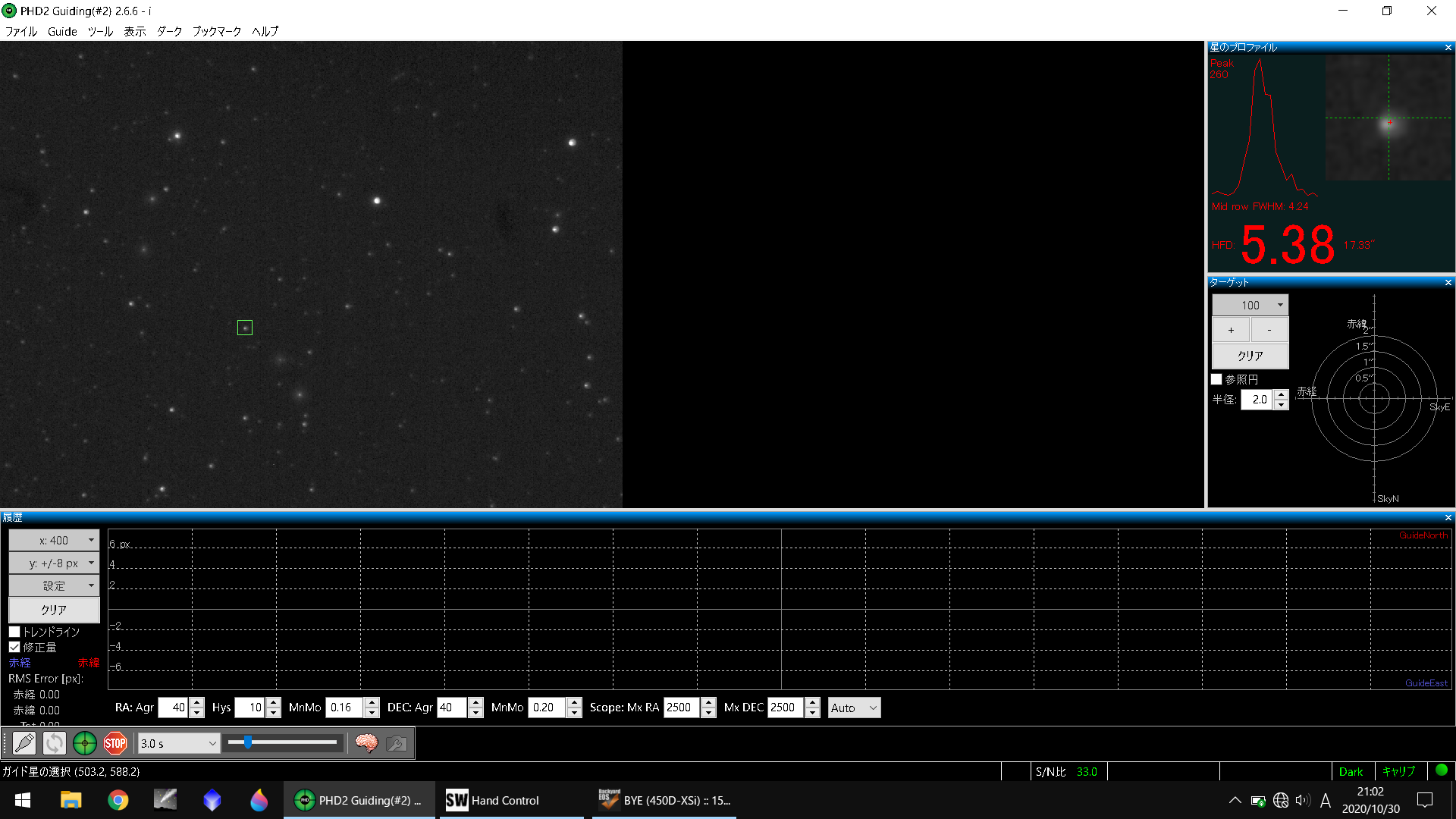
- ガイドカメラの露光を開始し、適切なガイド星をクリックします。このとき、ガイド星のSNRが30-60程度のものを使用します。
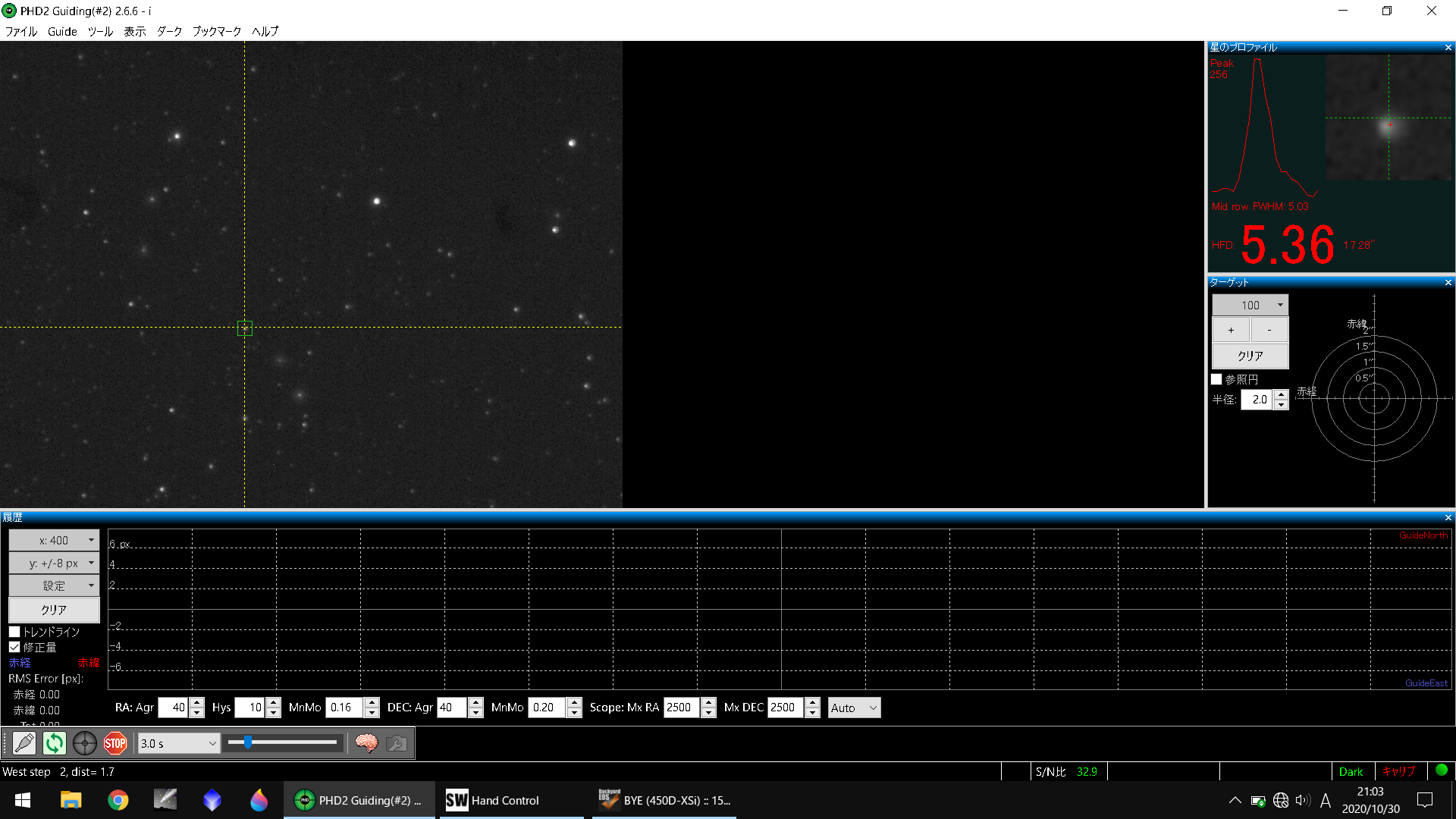
- Shift+”ガイド開始”をクリックし、キャリブレーションを行います。
- BYEに戻ります。”Load”をクリックし、撮影プランを読み込みます。今回の設定は次のようにしています。
ディザリングの時間短縮のため、撮影枚数5枚おきにディザリングをするようにしています。”Settings”より設定します。
- ISO: 1600
- Exposure: 240 sec
- Mirror lock: 1 (Enabled)
- Delay: (1以上の値にします。)
- Pause: (1以上の値にします。)
- Dithering: Enabled (per 5 frames)
- Settle Dither at: (小さくしすぎると、ディザが完了したと認識されず、いつまでも撮影が始まらないため、大きめの値に設定します。)
- Dither aggressiveness: (長焦点で撮る場合は値を小さくします。)
7. キャリブレーションが完了したら、BYEより撮影を開始します。
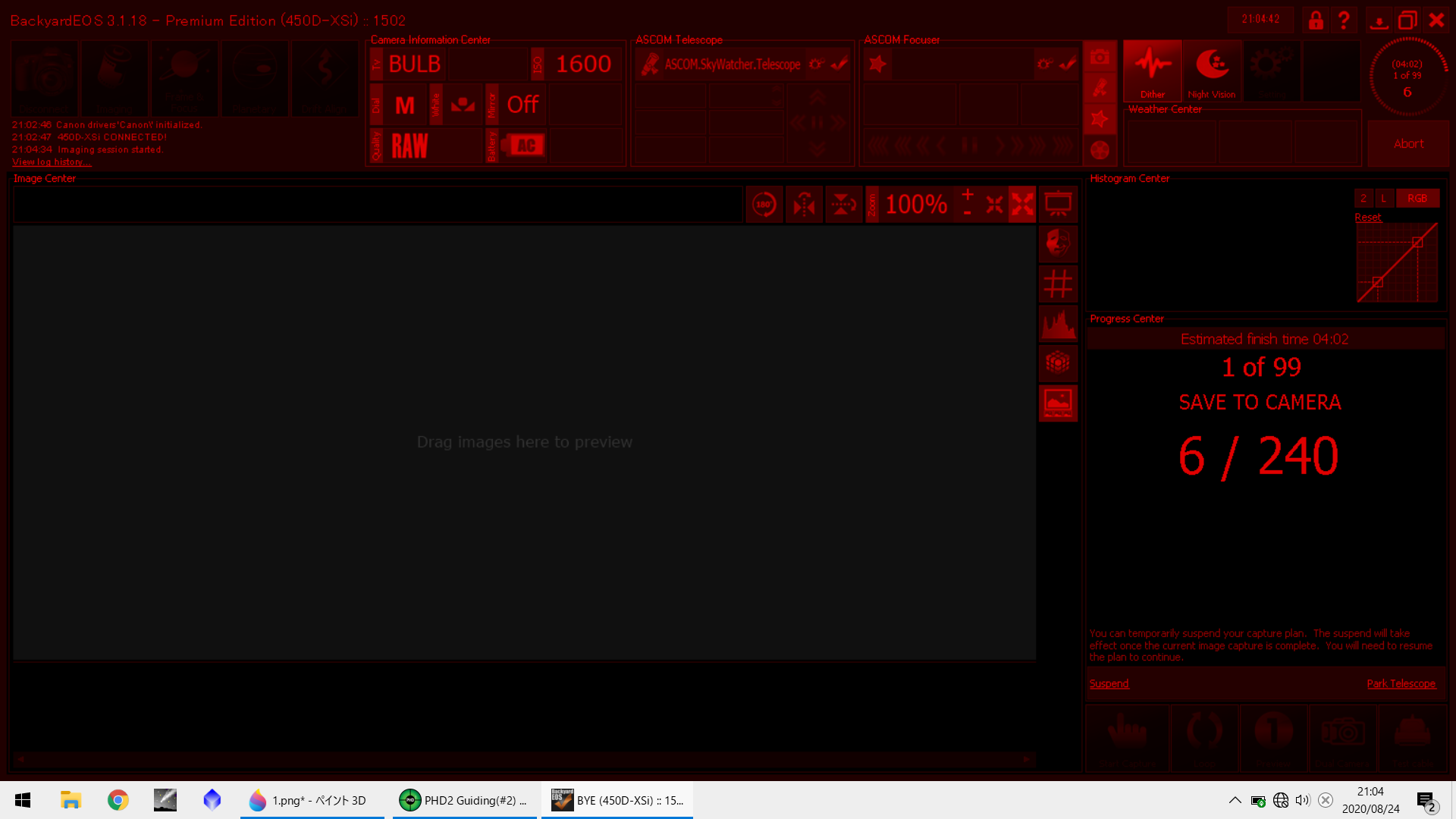
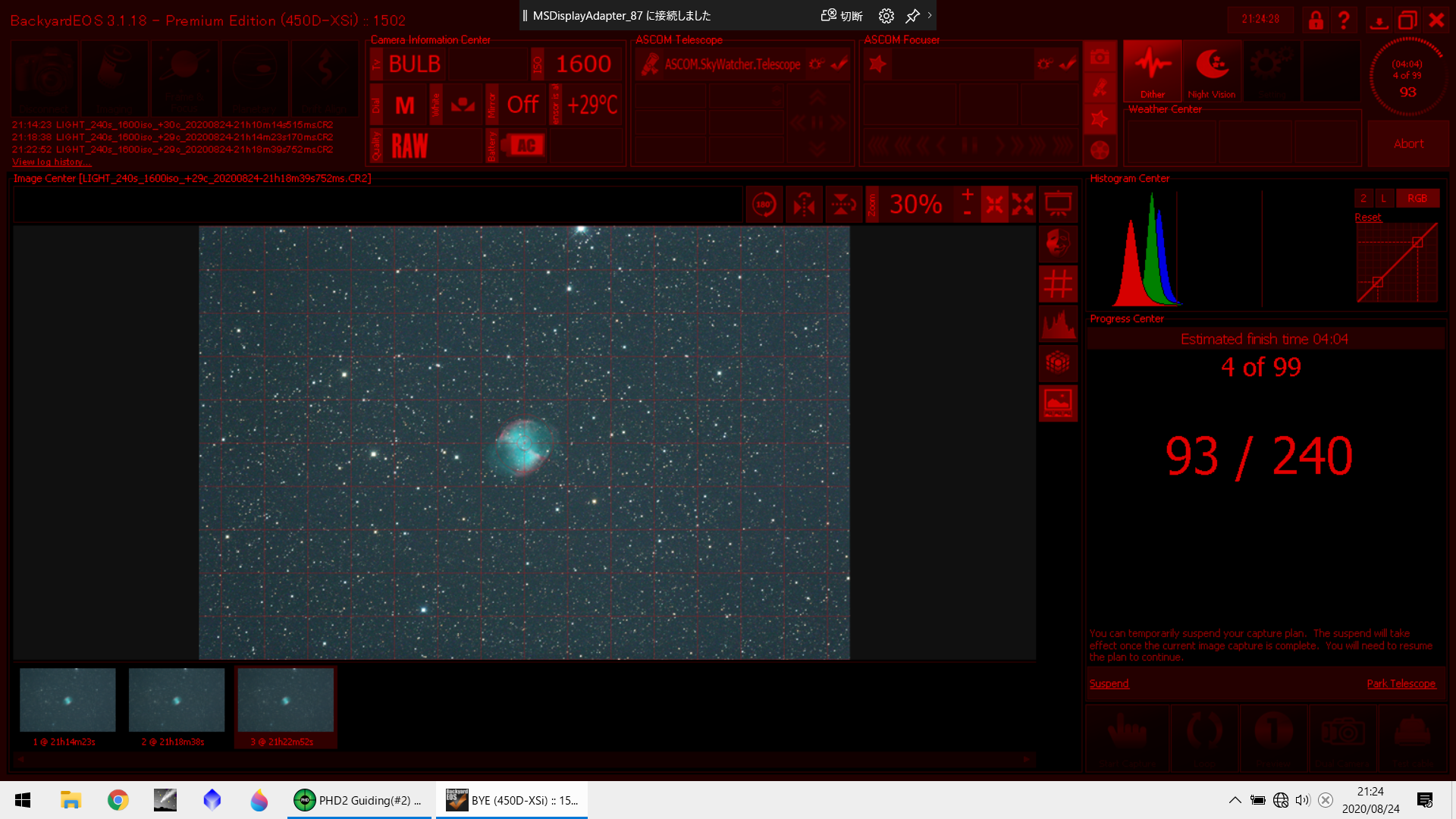
一枚目の撮影が終了したら、必ず撮影画像をチェックします。
(通常はカメラ上で確認しています。)
- 構図は狙い通りか?
- ガイドエラーがないか(星像は円形をしているか?)
- ピントはずれていないか?
- バーティノフマスクが付いていないか?
- 撮影画像の明るさは適切か?(ヒストグラムを表示して確認する。)
ヒストグラムのピークが左から1/3程度にあることを一つの目安としていますが、条件により変更することもあります。
撮影結果が問題なければ、撮影を続行します。
対象を変えるとき、環境温度が著しく(3℃以上)変動したとき、撮影開始から2時間以上経ったときなどは、必ずピントをチェックします。ずれている場合は手順⑤に沿って明るい星を導入し、バーティノフマスクでピント合わせをやり直します。
以上が、私のとっている直焦点撮影の手順となります。
おはようございます。
執筆お疲れ様でした\(//∇//)\
基本的な流れは、ふむふむ。。。なるほど。。。ほぼ同じです(笑)
普段から同じことを淡々と機械的にやってますが、これを文章化するとビックリする程長くなるんですよね。
以前簡略的に記事にしたときもそうでした\(//∇//)\
コメントありがとうございます。
自分のやっている手順がそれなりに正しくて、誰かしらの役に立ちそうということがわかってよかったです。
これでもかなり端折ったのですが、文章化するとほんと長いですねえ。